수행기록퀘스트3
엣지 AI 기반 자율제조 프레임워크 — 삽질에서 깨달음까지
Industrial Edge AI Solution Challenge 2026 Team Davinci | AMFX: Autonomous Manufacturing Framework with Edge AI
1. 처음 만난 PC를 포맷해야 합니다
수작업 절차
어떤 PC든 처음 받으면 하는 일:
1. 전원 버튼을 누른다
2. BIOS에 들어가 부팅 순서를 바꾼다
3. USB 설치 디스크를 꽂는다
4. OS를 설치한다 (언어, 키보드, 파티션, 사용자...)
5. 초기 설정을 한다
사람이 모니터 앞에 앉아서, 수십 번 키보드를 치는 반복 작업. 공장에서 100대, 1000대를 세팅한다면?
로봇과 자동화한다면?
빈 PC 앞에 로봇을 놓고,
전원을 켜고,
BIOS를 설정하고,
OS를 설치한다.
사람 개입 = 0
이걸 하려면 로봇이 해야 할 일: 보고(카메라) → 판단하고(AI) → 움직이고(IK) → 조작한다(HID)
6대 난제를 해결하기 위해 — 직접 공정을 만들었다
난제를 "선택"한 것이 아니다. 직접 공정을 만들어 데이터를 발생시켰더니, 6대 난제가 정말로 자연 발생했고, 하나씩 삽질하면서 해결했다.
로봇이 목표를 찾는다 → 위치가 틀리면? → ⑤ 공정 제어
로봇이 버튼을 누른다 → 힘이 과하면? → ② 이상징후
화면을 읽어야 한다 → OCR이 안 되면? → ③ 품질 검사
BIOS/OS 설치를 판단 → 상황이 바뀌면? → ① 맞춤형 AI
키보드를 입력해야 한다 → HID가 안 먹으면? → ① 맞춤형 AI
매 동작마다 기록한다 → 데이터는? → ④ 파이프라인
외부 없이 동작해야 → 보안은? → ⑥ Edge + 보안
그리고 또 하나의 난제를 식별했다:
★ 이 수작업을 자동화하려면 공정 자체를 새로 정의해야 한다 → ⑦ 공정 창출
스마트 팩토리의 본질: 기존 수작업을 그대로 자동화하는 것이 아니라, 자동화에 맞게 공정 자체를 재설계하는 것. "로봇이 USB를 꽂을 수 없다"는 한계에서 "전자 스위칭으로 물리 삽입 자체를 없앨 수 있지 않을까?"라는 공정 재설계 아이디어가 나왔다 (TS3USB30, 구상 단계). DigiKey가 말하는 Smart Factory 4.0의 핵심도 같다 — 자동화가 공정을 바꾸고, 바뀐 공정이 새로운 데이터를 만든다.
2. Phase 1: 물리 만능주의의 실패
"로봇이 전부 물리적으로 해야지" USB를 꽂고, 키보드를 치고, 화면을 읽고...
시도와 현실
| 시도 | 결과 | 원인 |
|---|---|---|
| USB를 로봇으로 물리 삽입 | Visual Servoing 0.07mm 수렴 성공! 근데... 삽입하려니까 밀린다 | 삽입력 필요, 백래시 |
| 카메라로 모니터 화면 촬영 | ESP32-CAM → OCR 60%, LLM 매번 호출 → 비용 폭발 | 반사광 + 워핑 |
$30 서보 로봇의 한계
| 항목 | 현실 |
|---|---|
| 필요한 정밀도 | ±0.5mm |
| 기어 백래시 | ~2mm |
| 필요한 삽입력 | ~5N |
| 힘 제어 | 불가능 |
사고: 서보 모터 2회 고장 — 장애 대응의 진화
1차 고장: IK 없이 고생
연속 고부하 → 서보 과열 → 배선 피복 녹음 → 기어 변형. 교체 후 캘리브레이션 절차가 없어 수작업으로 각도를 하나씩 맞추느라 수 일 소요.
2차 고장: IK + MCP로 빠른 복구
같은 증상 재발. 하지만 이번에는:
- IK 캘리브레이션 절차가 코드로 정립되어 있었고
- MCP 서버(
amfx-ik-control)로 검증 자동화 - 서보혼 방향 역전(direction +1→-1) 발견 → 카메라 3대로 즉시 확인 → 수 시간 복구
모든 과정이 라벨링된 데이터로 저장
서보 교체, 캘리브레이션 시행착오, FK/IK 검증 결과 — 같은 DB row에 센서값+관절각도+TCP 좌표+작업 컨텍스트를 함께 기록. 고장 → 교체 → 복구 과정 자체가 이상징후 탐지 모델의 학습 데이터가 된다.
"고장이 나야 고장을 예방할 수 있다" — 1차는 고생, 2차는 절차화, 다음은 자동화.
IK(역기구학)란 무엇이고, 왜 이렇게 어려운가
**IK(Inverse Kinematics, 역기구학)**란 "로봇 끝(TCP)을 원하는 위치에 갖다 놓으려면 각 관절을 몇 도로 꺾어야 하는가"를 계산하는 것이다.
목표: TCP를 (200, 0, 275)mm에 놓아라
→ base를 몇 도? shoulder를 몇 도? elbow를 몇 도? wrist를 몇 도?
→ 이 역방향 계산이 IK
산업용 로봇은 엔코더(각도 센서)가 내장되어 있어 현재 각도를 정확히 안다. 그리고 제조사가 정밀 캘리브레이션 데이터를 제공한다. 하지만 $30 서보 로봇에는:
| 산업용 로봇 | $30 서보 로봇 |
|---|---|
| 엔코더 내장 (0.01° 정밀도) | 엔코더 없음 (PWM 신호만) |
| 제조사 캘리브레이션 데이터 | 데이터시트 없음 |
| 링크 길이 정밀 가공 | 수작업 측정 (버니어 캘리퍼스) |
| 감속기 백래시 < 0.1mm | 기어 백래시 ~2mm |
| 서보혼 정밀 결합 | 서보혼 방향이 교체마다 바뀜 |
따라서 IK를 동작시키려면 모든 파라미터를 직접 측정하고, 카메라로 검증하고, 시행착오로 맞춰야 한다. 이 과정이 IK 캘리브레이션이다.
IK 캘리브레이션에 필요한 절차
1. 링크 길이 측정 ? 각 관절 축 중심 사이의 물리 거리
2. 서보 홈 위치 측정 ? 각 관절을 알려진 자세(수평/수직)에 놓고 서보 각도 기록
3. 방향(direction) 결정 ? 서보 각도를 올렸을 때 팔이 어느 쪽으로 움직이는지 (+1/-1)
4. FK(순기구학) 수식 검증 ? 서보 각도 → TCP 좌표 계산이 실제와 맞는지 확인
5. IK(역기구학) 검증 ? TCP 좌표 → 서보 각도 계산 후 실제 이동, 오차 측정
6. 반복 ? 오차가 허용 범위 안에 들어올 때까지 파라미터 조정
이 절차를 서보 교체할 때마다 다시 해야 한다. 그래서 1차 고장 때는 수 일이 걸렸고, 2차에는 절차를 코드화+MCP 서버화하여 수 시간으로 단축했다.
IK 개발 — 수십 회의 시행착오, AI 분산 협업
$30 서보 로봇에는 엔코더도 없고, 데이터시트도 없다. 모든 것을 직접 측정하고 시행착오로 캘리브레이션했다.
IK 작업은 Claude 에이전트(오케스트레이션)와 Codex 5.3(기구학 전문 연산)에 분산하여 전문성을 강화했다. Codex 5.3에게 3대 카메라(Top View, Side View, Eye-in-Hand)의 실시간 이미지와 ArUco 마커 좌표를 제공하고, 카메라 이미지 기반의 마커 검증 IK 방식을 함께 고안했다.
기하학적 IK Solver 설계
6축이지만 FK/IK는 4축(base, shoulder, elbow, wrist_pitch)으로 풀었다. J5(wrist_roll)는 방향만, J6(gripper)는 개폐만 담당.
물리 각도 = home_physical + (servo_angle - servo_home) × direction
이 한 줄 수식의 4개 파라미터(servo_home, home_physical, direction, link_length)를 찾는 데 4일이 걸렸다.
ArUco 마커 기반 IK 캘리브레이션 방식
엔코더 없이 IK 정확도를 검증하려면 외부 관측이 필수다. OpenCV ArUco (DICT_4X4_50) 마커 시스템을 설계했다:
| 마커 ID | 크기 | 부착 위치 | 용도 |
|---|---|---|---|
| ID 0 | 3cm | 로봇 TCP (펜 끝) | TCP 실측 위치 추적 |
| ID 1~4 | 4cm | 작업대 고정 (알려진 좌표) | Homography 계산 (pixel→mm 변환) |
| ID 5 | 3cm | 타겟 (버튼 위치 등) | 작업 목표 위치 |
IK 검증 절차:
1. 고정 마커 4개 감지 → Homography 행렬 계산 (pixel→world mm)
ID 1: (150, +100)mm ID 2: (150, -100)mm
ID 3: (250, 0)mm ID 4: (100, 0)mm
2. 로봇을 IK 목표 위치로 이동
3. Top View 카메라로 TCP 마커(ID 0) 촬영
→ pixel 좌표 → Homography 변환 → world 좌표 (mm)
4. Side View 카메라로 높이(z) 검증
→ 수직 방향 확인
5. FK 예측 좌표 vs 카메라 관측 좌표 비교
→ 오차 < 0.3mm이면 PASS
6. Eye-in-Hand 카메라로 근접 작업 시 미세 검증
이 방식으로 엔코더 없이도 카메라+마커로 FK/IK를 정량 검증할 수 있었다.
캘리브레이션 과정
| 단계 | 방법 | 시행착오 |
|---|---|---|
| 링크 길이 | 버니어 캘리퍼스로 직접 측정 | 3회 재측정 (축 중심점 찾기 어려움) |
| 서보 홈 위치 | 서보를 물리적으로 수평/수직에 놓고 각도 기록 | 관절마다 기준이 다름 |
| 방향(direction) | 서보 +10° → 카메라로 팔이 올라갔는지 내려갔는지 확인 | 엘보우 direction=-1 (서보↑→팔 앞으로) 발견에만 반나절 |
| home_physical | vertical_90 제약조건 (어깨=90°일 때 팔이 수직) | 수식 역산으로 -67.75° 도출 |
엘보우 서보혼 재장착 — 전체 재캘리브레이션
서보 과열 사고 후 기어 변형 → 서보 교체 → 서보혼 장착 각도가 바뀜 → FK 전체 틀어짐.
교체 전: servo_home = 72.75, direction = +1
교체 후: servo_home = 87.25, direction = -1
변환식: new_servo = 160 - old_servo
direction이 반전된 것을 발견하기까지 2시간. 카메라 top_view + side_view로 서보 각도를 +10° 올려보고, 팔이 어느 쪽으로 움직이는지 반복 확인. Codex 5.3이 카메라 이미지 3장(top, side, eye-in-hand)을 동시 분석하여 direction 역전 현상을 수치적으로 확인했다.
IK 검증 — 5개 포즈 + Round-Trip
| 포즈 | 목표 TCP (mm) | 실제 오차 | 결과 |
|---|---|---|---|
| Forward High | (200, 0, 275) | 0.2mm | PASS |
| Left High | (150, 100, 275) | 0.3mm | PASS |
| Right High | (150, -100, 275) | 0.3mm | PASS (Left와 완벽 대칭) |
| Center Lower | (180, 0, 200) | 0.2mm | PASS |
| Forward-Left Low | (200, 80, 200) | 0.2mm | PASS |
| Round-Trip Home | 시작→5포즈→복귀 | 0.0mm | PASS (완벽 일치) |
검증 시 3대 카메라로 동시 촬영: Top View(XY 평면), Side View(XZ 평면), Eye-in-Hand(근접 확인). 각 포즈에서 ArUco 마커 감지 → Homography 변환으로 FK 예측 vs 실측 비교.
MCP 서버 — Single Source of Truth
포즈와 속도를 여러 곳에서 정의하면 불일치로 충돌 사고가 난다. MCP 서버 코드가 유일한 진실 소스:
amfx-power-button: 전원 버튼 IK 포즈 + 속도 + 안전 가드amfx-ik-control: 일반 IK 이동 + 직선 삽입 + TCP 좌표 가드- TCP x guard: z < 220mm일 때 x < 150mm 강제 — 로봇 TCP가 Target PC 본체와 충돌하는 것을 방지
- 절대 금지: 직접 curl로 로봇에 명령 → MCP 가드 우회 위험
Codex 5.3이 MCP 도구를 설계하여, 복잡한 IK 시퀀스를 단순한 도구 호출로 추상화했다:
MCP Tool: short_key → 전원 켜기 (LIFT→APPROACH→PRESS 0.05s→RETRACT→PARK)
MCP Tool: long_key → 강제 종료 (LIFT→APPROACH→PRESS 5.0s→RETRACT→PARK)
MCP Tool: move_tcp → IK 좌표 이동 (안전 가드 포함)
AI 에이전트는 IK 수식이나 서보 각도를 몰라도 short_key 한 번이면 전원 버튼을 누를 수 있다. IK의 복잡성을 MCP 도구 뒤에 숨겨서, 누구든(Claude든, Codex든, 사람이든) 안전하게 로봇을 제어할 수 있게 만들었다.
$30 서보 로봇으로 0.2mm FK/IK 정밀도를 달성한 것은 엔코더가 아니라 카메라 3대 + ArUco 마커 + 시행착오 캘리브레이션의 결과다. IK 전문 작업은 Codex 5.3에 분산하여, Claude(오케스트레이션) + Codex(기구학 연산) 협업 구조로 효율을 높였다.
3. 삽질 → 깨달음: 5단계 진화
물리 만능 → 전자 스위칭(구상) → 센싱 품질 → 에이전트 효율 → 최적 분리
"로봇이 다 해야지" TS3USB30 $4 제안 HDMI 캡처 $10 ReAct→Plan-Execute 물리: 전원 버튼만
→ 서보가 탔다 → USB 물리 삽입 한계 → OCR 60%→100% → LLM 호출 30x↓ 나머지: 전부 전자적
처음 계획 → 실제 구현 → 다음 아이디어
| 작업 | 처음 계획 | 실제 구현 | 다음 아이디어 |
|---|---|---|---|
| USB | 로봇이 물리 삽입 | 사람이 수동 1회 삽입 (백래시+삽입력 한계) | TS3USB30 전자 스위칭 ($4, 구상) |
| 키보드 | 로봇이 물리 타이핑 | Pico HID ($4) — UART→USB HID 에뮬레이션 | 구현 완료, 유지 |
| 화면 읽기 | 카메라로 모니터 촬영 | ESP32-CAM WiFi 캡처 (OCR→AI 판독) | HDMI 캡처보드 ($10) 디지털 직접 수신 |
| 전원 | 로봇이 본체 버튼 누름 | 1mm 저압 스위치 + IK 프레스 (MCP short_key) |
구현 완료, 유지 |
깨달음: "무엇을 물리적으로 할 것인가"의 경계를 찾는 것이 제조 라인 설계의 본질
4. 실제로 해본 것 — 2가지 물리 작업
사례 1: 전원 버튼 프레스
$30 서보 로봇으로 PC 본체 전원 버튼을 누른다.
문제: 본체 버튼 압력 > 서보 출력 → 누를 수 없음
해결: 1mm 저압 택트 스위치로 교체 → "힘"이 아니라 "정확도"로 전환
결과: MCP short_key 한 번이면 전원 ON (IK 0.2mm 정밀도)
IK 캘리브레이션 → MCP 도구화 → 반복 가능한 자동 전원 제어 완성.
사례 2: BIOS 설정 → Ubuntu 설치 전 과정 자율 수행
전원이 켜진 후, ESP32-CAM으로 모니터 화면을 촬영하고, Claude Agent가 화면을 해석해서 Pico HID로 키보드를 조작한다.
ESP32-CAM (WiFi) → 화면 캡처 (2048×1536)
↓
Claude Agent → 화면 상태 분류 + OCR → 다음 키 결정
↓
Jetson → HTTP → RPI4 → UART → Pico → USB HID → Target PC
↓
BIOS POST → F8 Boot Menu → USB 선택 → GRUB → Ubuntu Installer
→ 언어/키보드/네트워크/파티션/사용자 설정 → 설치 완료 → 재부팅 → 로그인
전 과정을 Claude Agent가 1회 완전 자율 수행에 성공했다.
| 단계 | AI가 한 일 |
|---|---|
| BIOS POST | 화면에서 "Press F8" 인식 → F8 키 전송 |
| Boot Menu | USB 드라이브 항목 OCR → 방향키+Enter |
| Ubuntu Installer | 각 화면(언어, 파티션, 사용자 등)마다 판단 → 입력 |
| 설치 중 | 진행률 모니터링 → 10~20분 대기 |
| 완료 후 | "Restart Now" 인식 → 클릭 → 재부팅 → 로그인 |
예상 못한 삽질: 보안과 절전
자율 설치 과정에서 OS/하드웨어 레벨의 예상 못한 장벽에 부딪혔다:
| 문제 | 증상 | 해결 |
|---|---|---|
| Ubuntu 절전 | 설치 중 10분 무입력 → 화면 꺼짐 → ESP32-CAM 검은 화면 → Agent 판단 불가 | 설치 전 gsettings 절전 해제, 또는 주기적 키 입력으로 깨우기 |
| Ubuntu 잠금화면 | 재부팅 후 자동 잠금 → 비밀번호 입력 필요 → Agent가 로그인 화면 인식 필요 | 화면 상태 분류에 login_screen 추가, 자동 비밀번호 입력 |
| Pico USB 인식 | Ubuntu가 Pico를 "새 장치"로 인식 → 팝업 → 설치 흐름 방해 | Pico를 키보드+마우스로만 인식시키는 CircuitPython 설정 |
| BIOS 보안 부팅 | Secure Boot 활성화 → USB 부팅 거부 | BIOS에서 Secure Boot 비활성화 단계 추가 |
| SSD 고장 발견 | 설치 반복 중 디스크 에러 → 파티션 실패 → 설치 불가 | AI가 에러 화면 판독 → SSD 불량 판단 → 물리 SSD 교체 (128GB) |
SSD 고장은 의도한 시나리오가 아니었다. 자율 설치를 반복하다가 우연히 디스크 에러를 만났고, Agent가 화면 에러 메시지를 읽어 SSD 불량을 판단했다. 결과적으로 "이상징후 탐지 → 원인 진단 → 부품 교체"라는 실제 제조 현장의 장애 대응 시나리오를 경험하게 되었다.
소프트웨어만 짜면 될 줄 알았는데, OS의 보안/절전 정책이 자율 제어의 숨은 적이었고, SSD 고장까지 만났다.
5. 그래서 뭘 만들었나 — 핵심 숫자
| 지표 | 수치 | 설명 |
|---|---|---|
| 0.2mm | FK/IK 정밀도 | 6축 서보 로봇 |
| 0.07mm | Visual Servoing 수렴 | ArUco + Homography |
| 88x | Edge vs Cloud 속도 | 84ms vs 7,435ms |
| 7/7 | 난제 해결 | 6대 + 공정 창출 |
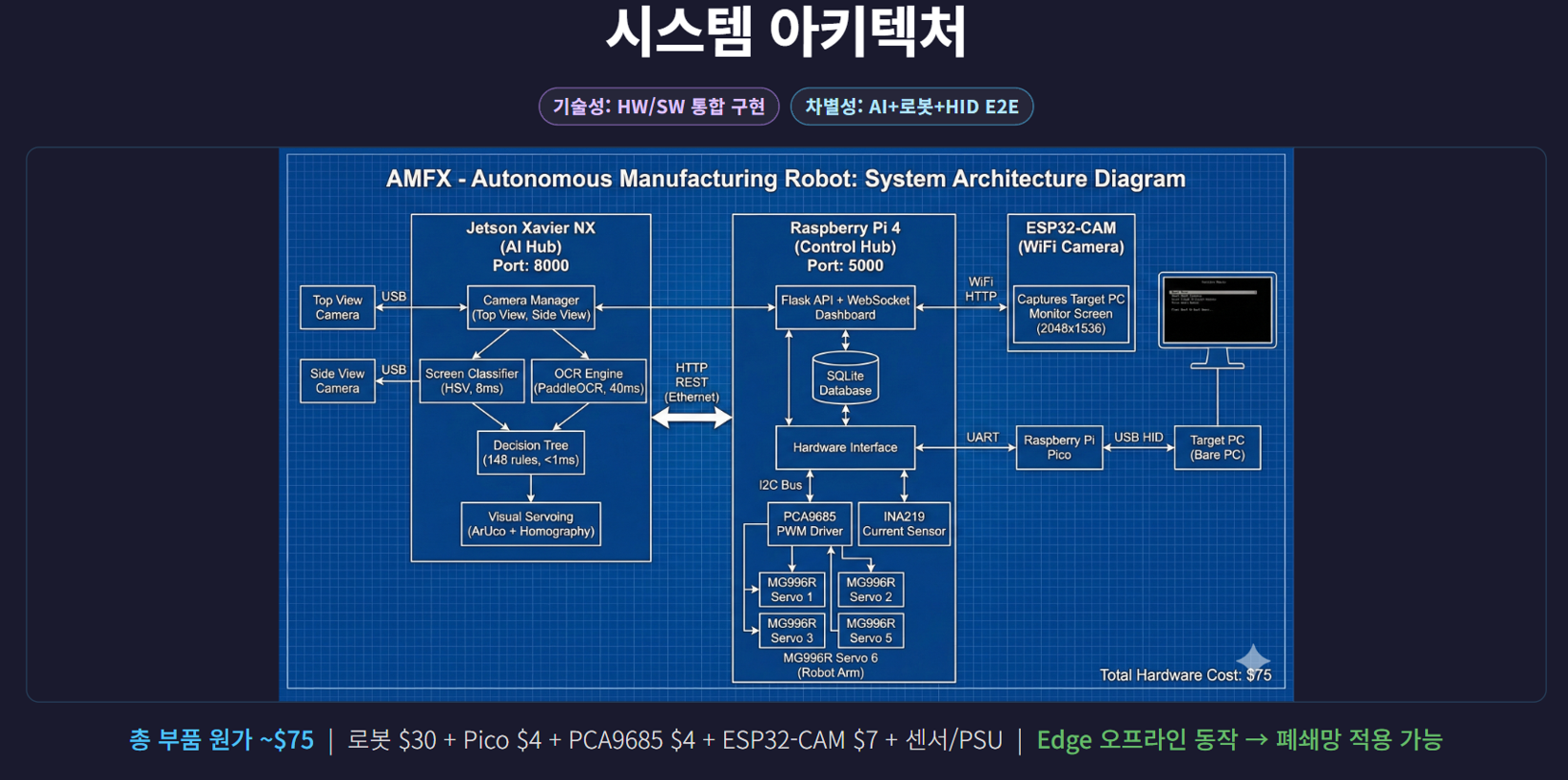
시스템 아키텍처 — 통신 구조
┌──────────────────────────────────────────────────────────────────────┐
│ Jetson Xavier NX (AI Hub, :8000) │
│ ┌────────────┐ ┌────────────┐ ┌────────────┐ ┌──────────────┐ │
│ │ Claude │ │ YOLO v8 │ │ Visual │ │ Camera │ │
│ │ Agent │ │ TensorRT │ │ Servoing │ │ Manager │ │
│ └─────┬──────┘ └────────────┘ └──────┬─────┘ └──┬───┬───┬───┘ │
│ │ │ │ │ │ │
│ │ HTTP REST │ HTTP POST │ │ │ │
├────────┼────────────────────────────────┼────────────┼───┼───┼──────┤
│ ▼ ▼ │ │ │ │
│ ┌─────────────────────────────────────────────┐ │ │ │ │
│ │ Raspberry Pi 4 (Control Hub, :5000) │ │ │ │ │
│ │ │ │ │ │ │
│ │ Flask API ←── HTTP REST ──→ Jetson │ │ │ │ │
│ │ │ │ │ │ │ │
│ │ ├── I2C ──→ PCA9685 ──→ MG996R ×6 (로봇) │ │ │ │ │
│ │ ├── I2C ──→ INA219 (전류 센서, addr 0x41) │ │ │ │ │
│ │ └── UART /dev/ttyAMA0 @ 115200 │ │ │ │ │
│ │ │ │ │ │ │ │
│ │ ▼ │ │ │ │ │
│ │ Pico (CircuitPython) │ │ │ │ │
│ │ │ USB HID │ │ │ │ │
│ │ ▼ │ │ │ │ │
│ │ Target PC (키보드/마우스) │ │ │ │ │
│ └─────────────────────────────────────────────┘ │ │ │ │
│ │ │ │ │
│ ┌─── USB 카메라 ────────────────────────────────────┘ │ │ │
│ │ Top View (/dev/video3, 640×480) │ │ │
│ │ Side View (/dev/video1, 640×480, 180° 회전) ────────┘ │ │
│ │ Eye-in-Hand (/dev/video5 또는 RPI4 HTTP) ──────────────┘ │
│ └──────────────────────────────────────────────────────────────┘ │
│ │
│ ┌─── WiFi ───────────────────────────────────────────────────┐ │
│ │ ESP32-CAM (192.168.0.50) ── HTTP GET /capture/hires │ │
│ │ → Target PC 모니터 화면 캡처 (2048×1536) │ │
│ └────────────────────────────────────────────────────────────┘ │
└──────────────────────────────────────────────────────────────────────┘
통신 프로토콜 요약
| 경로 | 프로토콜 | 용도 |
|---|---|---|
| Jetson ↔ RPI4 | HTTP REST (Ethernet) | 로봇 제어, IK, HID 중계 |
| RPI4 ↔ PCA9685 | I2C (addr 0x40) | 6축 서보 PWM |
| RPI4 ↔ INA219 | I2C (addr 0x41) | 전류 모니터링 |
| RPI4 ↔ Pico | UART 115200 (GPIO14/15→GP0/GP1) | HID 키보드/마우스 명령 |
| Pico → Target PC | USB HID | 물리 키보드/마우스 에뮬레이션 |
| Jetson ← ESP32-CAM | HTTP GET (WiFi) | 화면 캡처 (2초 간격) |
| Jetson ← USB 카메라 ×3 | USB (V4L2) | Top/Side/Eye-in-Hand 영상 |
배포 — OTA 없이 실시간 교체
OTA 인프라 대신 RPI4가 직접 제어 허브이므로 scp/ssh로 실시간 서버+코드 교체가 가능하다:
# Backend 코드 → RPI4 실시간 배포
scp -r backend/ rpi4:/home/arm/amfx/
ssh rpi4 "cd /home/arm/amfx && fuser -k 5000/tcp; nohup python run.py --production &"
# AI 코드 → Jetson 실시간 배포
scp -r jetson_ai/ jetson:/home/nvidia/amfx/
ssh jetson "cd /home/nvidia/amfx && fuser -k 8000/tcp; nohup uvicorn main:app --host 0.0.0.0 --port 8000 &"
- PDCA 반복 시 코드 수정 → 즉시 배포 → 즉시 검증 (수 분)
- 레거시: OTA 시스템 구축 + 펌웨어 빌드 + 배포 검증 = 수 일
구성 요약
- 4대 카메라: Top View + Side View + Eye-in-Hand + ESP32-CAM (화면 캡처)
- 2대 컴퓨터: Jetson (AI) + RPI4 (제어)
- 1대 로봇: 6축 MG996R (FK/IK)
- 1대 Pico: USB HID (키보드/마우스 에뮬레이션)
실제 시연 — 물리적으로 무엇을 했나
Claude 에이전트로 전원 버튼→Ubuntu 설치 전 과정을 1회 완전 수행했다.
물리 작업 1: 전원 버튼 프레스 (저압 스위치)
$30 서보 로봇은 데스크탑 PC 본체의 전원 버튼을 누를 만한 압력이 부족했다. 따라서 1mm 저압 택트 스위치로 교체하여, 정밀도 기반의 반복 작업으로 전환했다.
동작 시퀀스:
1. LIFT 포즈 이동 (안전 높이)
2. APPROACH 포즈 이동 (스위치 바로 위)
3. PRESS: shoulder 190→160 (speed=120) ? TCP가 스위치를 누름
4. HOLD: short=0.05s (전원 켜기) / long=5.0s (강제 종료)
5. RETRACT: shoulder 160→190 (복귀)
6. PARK 포즈 + emergency_stop
- 왜 저압 스위치인가: 본체 버튼 압력 > 서보 출력 → 힘 제어 불가 → "힘이 아니라 정확도"로 전환
- IK 정밀도: 0.2mm (기하학적 IK, 엔코더 없이 달성)
- TCP x guard: z < 220mm에서 x < 150mm 강제 — Target PC 본체와의 충돌 방지
- MCP 서버: 포즈/속도의 유일한 진실 소스, 외부 접근 차단
버튼 프레스 = 이상탐지용 정상 데이터 수집
버튼 프레스는 단순 동작이 아니라 이상탐지를 위한 정상 데이터 라벨링 작업이기도 하다. 매 프레스마다 같은 DB row에 기록:
{timestamp, 전류(INA219), 전압, joint_angles[6], TCP_xyz, action:"short_key", result:"success"}
이 데이터가 누적되면 "정상 버튼 프레스"의 전류/전압/관절각도 패턴이 형성되고, 이상값(서보 나사 풀림, 기어 마모, 부하 증가 등)을 탐지하는 기준선이 된다.
실제 사례 (오늘): 서보 모터 고정 나사가 풀어져 좌표가 틀어짐 → 누적된 정상 데이터와 비교하면 관절각도 편차로 즉시 감지 가능 → 나사 재체결 + IK 재조정으로 복구. 이런 장애까지 포함한 데이터가 이상탐지 모델의 학습 데이터가 된다.
작업 = 수집: 별도의 데이터 수집 공정 없이, 반복 작업 자체가 이상탐지 모델의 정상 기준선을 만든다.
물리 작업 2: USB 삽입 (수동) + Ubuntu 자동 설치
USB 물리 삽입은 서보 백래시 ~2mm + 삽입력 부족으로 로봇 자율 수행이 불가능했다. 따라서 USB는 사람이 1회 수동 삽입하고, 이후 전원 버튼→BIOS→Ubuntu 설치 전 과정을 Claude 에이전트가 자율 수행한다.
이 한계 인식이 TS3USB30 전자 스위칭 구상으로 이어졌다 — "물리를 줄이고 전자로 대체"
전원 버튼을 눌러 PC가 켜지면, Claude 에이전트가 ESP32-CAM으로 화면을 캡처하고 Pico HID로 키보드/마우스를 조작하여 Ubuntu 설치 전 과정을 자율 수행한다.
실행 체인:
Jetson (Claude Agent) ←HTTP→ ESP32-CAM (화면 캡처)
│
│ HTTP (POST /api/v1/hid/key, /type, /combo)
▼
RPI4 (HID relay) ←UART→ Pico ←USB HID→ Target PC
| 단계 | 수행 내용 | AI 판단 |
|---|---|---|
| BIOS POST | F8 → Boot Menu 진입 | 화면 상태 분류 → 키 결정 |
| Boot Menu | USB 드라이브 선택 | OCR로 항목 읽기 → 선택 |
| GRUB | "Install Ubuntu" 선택 | 화면 인식 → Enter |
| Installer | 언어, 키보드, 네트워크, 파티션, 사용자 설정 | 각 화면별 판단 → 입력 |
| 설치 진행 | 10~20분 대기 | 진행률 모니터링 |
| 완료 | "Restart Now" 클릭 | 완료 화면 인식 → 재시작 |
| First Boot | 로그인 → 터미널 오픈 → 초기 설정 | 데스크탑 인식 → 명령 입력 |
1회 전체 수행 후, 이 수행 결과가 Edge MLOps의 입력 데이터가 된다.
6. 7대 난제 — 어떻게 해결했나
난제를 "선택"한 것이 아니다. 공정을 만들었더니 7개 전부 자연 발생했고, 삽질하면서 해결했다.
난제 매핑: 대회 문제 → 내 문제
| # | 난제 | 대회 문제 정의 | AMFX에서 만난 문제 |
|---|---|---|---|
| ① | 맞춤형 AI | 공정 상태별 다른 판단이 필요한데, 범용 AI로는 느리고 비싸다 | 화면 상태별 다른 키 입력 필요, Cloud LLM 7초/판단 |
| ② | 이상징후 탐지 | 장비 고장을 사전에 감지하여 가동 중단을 막아야 한다 | 서보 과열 → 기어 변형, 접촉 시 TCP 밀림 |
| ③ | 품질 검사 | 작업 결과가 정상인지 자동으로 판정해야 한다 | 버튼 눌림 성공/실패 판정, 화면 전환 확인 |
| ④ | 데이터 파이프라인 | 공정 데이터를 AI가 학습할 수 있는 형태로 수집해야 한다 | 전류만 쌓으니 맥락 없어 쓸 수 없었음 |
| ⑤ | 공정 제어 | 로봇이 정확한 위치에 반복적으로 도달해야 한다 | 서보 백래시 ~2mm, USB 삽입 불가 |
| ⑥ | 보안 + Edge | 폐쇄망 제조 환경에서 인터넷 없이 AI가 동작해야 한다 | Cloud 100% 의존 → 인터넷 없으면 멈춤 |
| ⑦ | 공정 창출 | 수작업이라 공정으로 정의조차 안 된 80%의 제조 영역 | 물리 삽입 불가 → 공정 자체를 재정의해야 했음 |
어떻게 해결했나
| # | 난제 | 삽질 | 해결 | 증거 |
|---|---|---|---|---|
| ① | 맞춤형 AI | Cloud LLM 매번 호출 → 7초/판단, 비용 폭발 | Cloud→Edge 점진 이관, DecisionTree 23규칙 | 84ms, 88x↑ |
| ② | 이상징후 탐지 | 엘보우 서보 과열 → 기어 변형 사고 | TorqueGuard: IK 시점에 좌표 기반 부하 사전 추정 | Score 75→차단 |
| ③ | 품질 검사 | YOLO 학습 데이터 없음, ESP32-CAM OCR 60% | ArUco 위치검증 + HDMI 캡처 OCR + AI 화면 판독 | 센서 퓨전 |
| ④ | 데이터 파이프라인 | 전류 데이터만 쌓으니 관절 맥락 없어 쓸 수 없었음 | 같은 row에 센서+관절각도+TCP 좌표 = 자동 라벨링 | 작업=수집 |
| ⑤ | 공정 제어 | 서보 백래시 ~2mm, 그리퍼 떨림, USB 삽입 불가 | 기하학적 IK 0.2mm + Visual Servoing 폐루프 0.07mm | 0.2mm 정밀 |
| ⑥ | 보안 + Edge | 클라우드 100% 의존 → 인터넷 없으면 멈춤 | Edge 규칙 90% + LLM fallback 10% + 온프레미스 DB | 오프라인 OK |
| ⑦ | 공정 창출 | 물리 삽입 불가 → 공정 자체를 재정의해야 했음 | 전자 스위칭(구상) + HDMI 캡처 → 물리→전자 공정 전환 설계 | 바이브 제조 |
모든 난제의 공통 패턴: 더 좋은 기술을 쌓아서 해결한 게 아니라, 문제를 다시 정의해서 해결했다.
7. Edge MLOps — Cloud가 가르치고, Edge가 실행
왜 Edge가 필요한가?
이 시스템의 강점은 전원 버튼 → BIOS 설정 → OS 설치까지 전 과정을 AI가 자율 수행할 수 있다는 것이다. 하지만 Cloud LLM에 100% 의존하면 인터넷 없이 동작 불가, 호출당 수 초 지연, API 비용 누적 문제가 있다.
전 과정 중 BIOS 부팅 순서 변경(어떤 디스크로 부팅할지 선택)을 Edge MLOps PoC 대상으로 선택했다. 이유:
- BIOS는 네트워크 없는 환경 — Cloud 호출 자체가 불가능한 상황이 실제로 발생
- 화면 상태가 명확히 구분됨 — 규칙 기반 Edge 모델로 대체 가능성이 높음
- 전체 공정의 앞단 — 여기가 Edge로 동작하면 나머지도 같은 패턴으로 확장 가능
시간 제약으로 전체 공정이 아닌 BIOS 부팅 순서 변경을 PoC로 수행했다. Cloud LLM으로 먼저 전 과정을 검증하고, 이 중 한 구간을 Edge로 전환하는 과정을 증명했다.
출발점: Claude Agent로 전 과정 1회 물리 수행
처음부터 Tiny LLM? 성능 부족 → 프레임워크 자체 검증 불가.
그래서 먼저 고성능 Cloud LLM(Claude Opus)으로 전원 버튼→Ubuntu 설치 전 과정을 1회 완전 수행했다. 이 1회 수행 데이터가 Edge 경량 모델의 학습 데이터가 된다.
1회 수행 시 자동 수집되는 메타데이터:
├── 화면 캡처 (ESP32-CAM JPEG) → 화면 상태 분류 학습용
├── LLM 판단 (action, reasoning) → 규칙 엔진 추출용
├── 화면 상태 (screen_state) → DecisionTree 학습용
├── HID 실행 결과 (success/fail) → 보상 신호
└── Phase 전이 기록 → 상태 머신 설계용
우리의 접근: Cloud LLM으로 먼저 증명 → 수행 결과 메타데이터화 → Edge 모델로 점진 이관
4-Phase 전환
1. Prototype 2. Shadow 3. Edge Primary 4. Edge Only
Cloud LLM 100% → Edge 병렬 실행 → Edge 먼저 시도 → Cloud 호출 0%
공정 검증 자동 라벨링 LLM은 fallback 84ms, 오프라인
LLM → Edge 대체 결과
| LLM이 하던 일 | 대체 Edge 모델 | 속도 개선 |
|---|---|---|
| 화면 상태 분류 | ScreenClassifier (heuristic) | 2,000ms → 5ms |
| 화면 텍스트 읽기 | PaddleOCR + TensorRT | 2,000ms → 30ms |
| 행동 결정 | DecisionTree (23 규칙) | 2,000ms → <1ms |
| 센서 이상 감지 | EdgeAnomalyDetector | threshold → ML |
| 복잡한 판단/복구 | LLM 유지 (10%) | fallback only |
= **숙련공(LLM)**이 공정을 만들고 → **자동화 라인(Edge)**이 반복 실행하는 산업 최적화 패턴
보안: 제조 데이터가 외부로 나가지 않는 구조
① 데이터 유출 차단 — Edge 전환
이 시스템의 가장 큰 보안 위협은 Cloud LLM 호출이다. 화면 캡처, 공정 데이터, AI 판단 요청이 외부 서버를 경유한다.
| Cloud LLM 단계 | Edge 전환 후 | |
|---|---|---|
| 화면 데이터 | 외부 API 서버로 전송 | Jetson 로컬 처리 |
| 판단 로직 | 외부 서버에서 실행 | DecisionTree 로컬 실행 |
| 네트워크 | 인터넷 필수 | 오프라인 동작 |
| 데이터 유출 | 가능성 있음 | 물리적 불가 |
Edge 전환 후 Cloud 호출 0% → 모든 데이터가 로컬 장비 안에서 처리된다.
대기업은 이미 Enterprise LLM을 폐쇄망에 배포하여 Cloud 단계에서도 보안을 유지한다. 이 프로젝트의 Cloud→Edge 전환 패턴은 Enterprise LLM 환경에서도 동일하게 적용된다: 폐쇄망 LLM으로 검증 → Edge 모델로 이관 → 최종적으로 LLM 호출 없이 자율 동작.
② 장비 접근 통제 — SSH 키 인증
장비 간 통신은 SSH 키 기반 인증만 허용. 비밀번호 로그인 비활성화.
- RPI4, Jetson, Target PC 모두
id_ed25519키 인증 - 배포(scp), 원격 제어(ssh), 로그 수집 전부 키 기반
- 실제로 RPI4 비밀번호 분실 → 키 인증만으로 운영 중
③ 물리적 격리 — HID 단방향 통신
Pico HID는 키보드/마우스 출력만 가능하다. Target PC의 데이터를 읽을 수 없다.
Pico → USB HID → Target PC: 키 입력, 마우스 이동 (출력만)
Pico ← Target PC: 전원 공급뿐 (데이터 수신 불가)
제어 시스템이 Target PC의 디스크, 네트워크, 메모리에 접근할 경로 자체가 없다.
8. PDCA 7회 — BIOS Boot Priority 자율 변경
Edge 규칙 엔진으로 BIOS 부팅 순서를 자율 변경. 양방향(SSD↔USB) 22 steps, Cloud 호출 0회.
반복 결과
| 회차 | 정확도 | 핵심 변경 |
|---|---|---|
| 1 | 0% | 초기 규칙만 |
| 2 | 57% | bios_popup 상태 추가 |
| 3 | 86% | 카운터 기반 규칙 |
| 4 | 100% | 스텝 카운터 완성 |
| 5 | 57% ← 회귀! | OCR 추가 → 기존 기능 깨뜨림 |
| 6 | 86% | OCR 허위양성 제거 |
| 7 | 100% | 카운터+OCR 안정 |
5회차 — 회귀의 교훈
"기능 추가(OCR)가 오히려 정확도를 깨뜨렸다" → 더 많은 기술 ≠ 더 좋은 결과 → 기존에 되던 것부터 지키고, 점진적으로 추가
최종 결과
| 방향 | 대상 | 단계 수 | Edge 자율 | Cloud 호출 |
|---|---|---|---|---|
| SSD→USB | Kingston USB (Ventoy) | 22 steps | 100% | 0회 |
| USB→SSD | SSD (Ubuntu) | 22 steps | 100% | 0회 |
7회 PDCA를 몇 시간 만에 돌렸다. 레거시 생산기술팀이라면? 수주~수개월.
9. Q1 설계 → Q3 실전: 답이 바뀌었다
Q1에서 설계한 답은 논문에서 나온 답이었고, Q3에서 재정의된 답은 로봇이 고장나고 서보가 타면서 나온 답입니다.
| 질문 | Q1 설계 (1월) | Q3 실전 (3월) | 패턴 |
|---|---|---|---|
| 이상을 미리 알 수 있나? | ML 예측 모델 | TorqueGuard 좌표 기반 예방 | 우회 |
| 불량 검사를 AI로? | YOLO 비전 검사 | 센서 퓨전 (전류+비전+LLM) | 퓨전 |
| 숙련자 경험 표준화? | if-else 규칙 | IK 좌표 + 경험 DB + HIL | 설계 |
| 데이터를 AI가 쓸 수 있게? | InfluxDB 파이프라인 | 같은 row에 센서+동작 = 라벨링 | 단순화 |
| 보안 보장 AI? | Secure Boot 암호화 | 클라우드↔로컬 전환 아키텍처 | 설계 |
Q1→Q3 변화의 공통 패턴
| Q1 (설계) | Q3 (실전) | 패턴 |
|---|---|---|
| 복잡한 인프라 (InfluxDB, MQTT, OTA) | 단순한 구조 (SQLite, REST, scp) | 단순화 |
| 단일 기술 의존 (YOLO만, ML만) | 다중 접근 퓨전 (전류+비전+LLM) | 퓨전 |
| "더 좋은 도구" | "다른 접근" | 우회 |
10. 바이브코딩 → 바이브 제조: AI가 PDCA를 수행할 수 있는 환경을 만들다
바이브코딩은 왜 가능한가?
바이브코딩이란 AI에게 의도를 말하면 AI가 코드를 생성하는 것이다. 이것이 가능한 이유는 개발 환경이 이미 AI-ready이기 때문이다:
| AI에게 필요한 것 | 개발 환경에서는 | 이미 있는가? |
|---|---|---|
| 눈 (상태 확인) | 터미널 출력, 로그, 테스트 결과 | O |
| 손 (실행) | 파일 읽기/쓰기, 명령어 실행 | O |
| 판단 기준 | 에러 메시지, 컴파일 결과, 테스트 통과 | O |
| 반복 구조 | 코드 수정 → 저장 → 실행 → 확인 | O |
개발자가 별도로 만들 것이 없다. IDE를 열고 AI에게 말하면 된다.
제조에서는 왜 안 되는가?
제조 환경은 AI-ready가 아니다. AI에게 "이 PC에 Ubuntu 설치해"라고 말해도 AI가 할 수 있는 게 없다:
| AI에게 필요한 것 | 제조 환경에서는 | 있는가? |
|---|---|---|
| 눈 (화면 확인) | 모니터 앞에 사람이 앉아야 함 | X |
| 손 (키보드/마우스) | 사람이 직접 입력해야 함 | X |
| 힘 (물리 조작) | 버튼, USB, 케이블 = 사람 손 | X |
| 판단 기준 | 숙련자 경험, 매뉴얼 | X |
| 반복 구조 | 없음 (수작업이니까) | X |
바이브 제조 = 이 X를 O로 바꾸는 것
이 프로젝트가 한 일의 본질: AI가 제조 PDCA를 수행할 수 있는 제어권과 환경을 만든 것.
| AI에게 필요한 것 | AMFX가 만든 것 | 구현 |
|---|---|---|
| 눈 | ESP32-CAM + 카메라 3대 | 화면 캡처 → OCR/LLM 분석 |
| 손 | Pico HID (키보드/마우스) | UART 명령 → USB HID 에뮬레이션 |
| 힘 | 6축 로봇 + IK + MCP | 버튼 프레스, 물리 조작 |
| 판단 기준 | Claude Agent + 화면 분류 | 화면 상태 → 다음 액션 결정 |
| 반복 구조 | PDCA 자동화 루프 | 실행 → 확인 → 수정 → 재실행 |
| 감각 | INA219 전류 + 관절 각도 | 이상탐지 정상 데이터 수집 |
바이브코딩: 개발자 → "로그인 폼 만들어줘" → AI가 코드 PDCA
바이브 제조: 엔지니어 → "이 PC에 Ubuntu 설치해줘" → AI가 공정 PDCA
차이: 바이브코딩은 환경이 이미 있고, 바이브 제조는 환경 자체를 만들어야 했다. 그 환경을 만든 것이 이 프로젝트다.
환경이 있으면 PDCA가 빨라진다
환경이 갖춰지면, AI가 사람 대신 PDCA를 수행한다:
| 생산기술 역할 | 레거시 (사람) | AMFX (AI) |
|---|---|---|
| 공정 설계 | 엔지니어 경험 + CAD, 수 주 | 제약조건 분석 → 플랜 생성, 수 분 |
| 비전 셋업 | 카메라+렌즈+조명+티칭, 수 일 | ESP32-CAM + LLM 분석, 수 분 |
| 동작 티칭 | 티칭펜던트 수동 교시, 수 일 | IK 좌표 API + 카메라 검증, 수 분 |
| 불량 분석 | 숙련자 경험, 수 시간 | AI 즉시 분석+추론, 수 초 |
| 24/7 가동 | 3조2교대, 인건비 | 무인 연속, $0 |
PDCA 1사이클이 수 주인 이유: "사람이 생각하고, 물리를 바꾸고, 사람이 확인"하기 때문. 환경을 만들면 AI가 생각+실행+확인을 대체 → 사이클이 수 분으로 줄어든다.
실제로 그랬다: PC 설치는 "딸깍"이었다
처음부터 딸깍은 아니었다. Ubuntu 설치 자동화는 삽질의 연속이었다:
- ESP32-CAM 화면 캡처 → 반사광, 왜곡, OCR 60% → 모니터 교체로 해결
- 절전 모드로 화면 꺼짐 → Agent 판단 불가 → 왜 멈췄는지도 모름
- Pico HID를 Ubuntu가 "새 장치"로 인식 → 팝업이 설치 흐름 방해
- BIOS Secure Boot → USB 부팅 거부 → 원인 파악에 시간 소모
- SSD 고장 → 설치 반복 중 우연히 발견
하지만 방향이 잡히자 딸깍이었다. 화면 캡처→판단→HID 입력→결과 확인이라는 PDCA 루프가 연결되니, 에이전트가 스스로 거의 모든 것을 해냈다. 마치 UI 기반 개발처럼 — 프레임워크가 잡히면 나머지는 흘러간다.
에이전트: BIOS 진입 → 부팅 순서 변경 → USB 선택 → Ubuntu 설치 → 로그인 → 초기 설정
사람: (지켜봄) (확인) (지켜봄) (지켜봄) (확인) (완료 확인)
사람의 역할은 실행이 아니라 중간 검증으로 바뀌었다. 이것이 바이브 제조의 핵심 — 어려운 건 모델이 아니라 환경을 만드는 것이다.
11. 실제 경험한 PDCA 가속 — 4가지 사례
사례 1: 버튼 프레스 캘리브레이션
- 레거시: 지그 설계→가공→장착→테스트→수정→재가공 = 수일~수주
- AMFX: IK 좌표 수정→API 호출→카메라 확인→재조정 = 수 분
- 하루에 50+ iteration, Z=250mm 최적점을 당일 발견
사례 2: USB 삽입 공정 재정의
- 레거시: 정밀 지그+가이드레일+공압 실린더 설계/제작 = 수 주
- AMFX: 서보잉 실패→AI와 대안 탐색→TS3USB30 전자 스위칭 구상 = 수 분
- "공정이 필요한가?" 자체를 AI와 재검토 → 공정을 전자적으로 재정의 (설계 완료, 부품 미구현)
사례 3: 화면 판독 비전 셋업
- 레거시: 비전 카메라+렌즈+조명+마운트+티칭+검증 = 수일~수주
- AMFX: ESP32-CAM 실패→HDMI 캡처 발견 = 수 분
- $10으로 "비전 셋업"이라는 공정 자체가 소멸
사례 4: 서보 열 손상 → 캘리브레이션 복구
- 레거시: 서보 교체→기구부 재조립→전체 재티칭→검증 = 수 일
- AMFX: 서보혼 재장착→AI와 방향/오프셋 재계산→자동 검증 = 수 시간
- direction=-1, hp=-67.75 도출. FK/IK 전체 검증까지 AI와 함께
공통점: 실패할수록 빨라진다 — 실패가 즉시 다음 PDCA의 입력이 됨
12. 경험 DB — 숙련공의 노하우를 데이터로
[사이클 1] PC 설치 → 실패 (BIOS 키 틀림)
→ 경험 DB: {board: "ASUS H81M-C", key: "F1"}
[사이클 2] 같은 보드 → DB 참조 → 즉시 성공
→ 경험 DB: {time: 25min, errors: 0}
[사이클 50] 새 보드 (Gigabyte) → 키 모름
→ AI 시행착오 → Del 키 발견
→ 경험 DB: {board: "Gigabyte B760", key: "Del"}
[사이클 100+] 대부분 플레이북만으로 완료
→ AI는 미지의 상황에서만 호출
→ 비용이 자연 수렴
레거시 vs AMFX 비교
| 레거시 | AMFX | |
|---|---|---|
| 노하우 저장 | 숙련공 머릿속 | 경험 DB |
| 전수 방법 | 도제식 (년) | DB 복사 (초) |
| 퇴직 시 | 노하우 소실 | DB 영구 보존 |
| 새 공정 | 0부터 시작 | 유사 경험 재활용 |
| 다른 현장 | 파견 (월) | 배포 (시간) |
솔직한 비판: 이상탐지 모델 자체는 쉽다
요즘 AI 이상탐지는 데이터만 있으면 딸깍이다:
- AutoEncoder 계열로 정상 패턴 학습 → 이상 재구성 에러
- 시계열 모델 (LSTM, Transformer) → 패턴 이탈 탐지
- 전통 ML (Isolation Forest, One-Class SVM) → 충분히 잘 됨
- MLOps 파이프라인으로 데이터 갱신 → 모델 드리프트 대응
모델 선택은 어렵지 않다. 진짜 어려운 건:
- 데이터를 어디서 구하나? — 공장에 센서 달고 수 개월 수집? 고장 데이터는 사고가 나야 생긴다
- 어떤 데이터를 쌓아야 하나? — 전류만? 진동만? → 맥락 없으면 쓸 수 없다
- 실제 이상을 만나봤나? — 논문의 벤치마크 데이터셋과 현장 데이터는 다르다
이 프로젝트의 접근: 공정을 직접 만들어서 데이터를 발생시켰다.
- 버튼 프레스 반복 → 정상 데이터 자동 누적
- 서보 나사 풀림, 기어 변형, 배선 용해 → 진짜 이상 데이터를 실제로 만났다
- 같은 row에
{전류, 전압, 관절각도[6], TCP좌표, 동작, 결과}→ 맥락 있는 라벨링
데이터 파이프라인의 진짜 핵심: 같은 row에 센서+동작+결과를 넣는 것. 모델은 나중에 골라도 된다. 라벨링된 실제 데이터를 가진 것이 경쟁력이다.
반면, 에이전트 기반 PC 설치는 수 개월 데이터를 모을 필요가 없었다. PDCA 환경(눈+손+판단+반복)이 연결되는 순간 에이전트가 바로 작업을 시작했고, 사람은 중간 검증만 했다.
이상탐지: 데이터가 있어야 딸깍 → 데이터를 만드는 게 진짜 일 에이전트 작업: 환경이 있으면 딸깍 → 환경을 만드는 게 진짜 일 이 프로젝트는 둘 다 했다.
13. 솔직한 한계 — 이것도 인사이트
한계를 숨기지 않는 것이 경쟁력. 이 한계가 다음 로드맵을 만든다.
$30 서보 로봇으로 못 하는 것
| 작업 | 결과 | 원인 | 대응 |
|---|---|---|---|
| USB 물리 삽입 | 불가능 | 백래시 ~2mm, 삽입력 부족 | 수동 1회 삽입 + TS3USB30 구상 |
| PC 본체 전원 버튼 | 압력 부족 | 서보 출력 < 버튼 압력 | 1mm 저압 택트 스위치로 교체 |
| 반복정밀도 | ~3mm | 기어 유격 | IK 0.2mm + Visual Servoing 보정 |
| 힘 제어 | 불가 | 위치 제어만 | "힘→정확도" 전환, 저압 부품 사용 |
이것을 인정하고, 전자 스위칭을 구상(TS3USB30, $4)한 것이 "더 비싼 로봇을 사자"가 아니라 **"공정을 재정의하자"**로 이어졌다.
한계 → 로드맵
| 현재 한계 | 개선 방향 |
|---|---|
| 기어 백래시 | 벨트/다이렉트 드라이브 |
| 구조 강성 부족 | 알루미늄 프레임+베어링 |
| 위치 제어만 | 토크/힘 제어 추가 |
| 힘 피드백 없음 | FSR/로드셀 at TCP |
SW 프레임워크(IK, Servoing, Agent)는 유효. HW가 바뀌어도 API 인터페이스로 분리 → 로봇 교체 시 SW 재사용 100%
14. 자율주행처럼, 자율제조에도 레벨이 있다
| Level | 자율주행 | 자율제조 | AMFX 현재 |
|---|---|---|---|
| L0 | 수동 운전 | 수동 조립 | 사람이 USB 꽂고 키보드 침 |
| L1 | 크루즈 컨트롤 | 단일 자동화 | 로봇이 버튼만 누름 |
| L2 | 부분 자율 | 로봇+AI, 사람 감시(HIL) | O 달성 |
| L2→L3 | 일부 구간 완전 자율 달성 | ← 현재 AMFX | |
| L3 | 조건부 자율 | Plan-Execute, 예외 시만 사람 | ← 다음 목표 |
| L4 | 고도 자율 | WoL+HID+캡처 무인 N대 | ← 비전 |
| L5 | 완전 자율 | 새 HW/OS도 자가 대응 | ← 미래 |
이미 L3에 진입하고 있는 근거:
| 구간 | 자율 수준 | 사람 개입 |
|---|---|---|
| BIOS 부팅 순서 변경 | Edge 100% 자율 (22 steps, Cloud 0회) | 없음 |
| 전원 버튼 프레스 | MCP 자율 (IK + 가드) | 없음 |
| Ubuntu 전체 설치 | Cloud LLM 자율 (BIOS→설치→로그인) | 없음 |
| USB 물리 삽입 | 수동 | 사람이 꽂음 (물리 한계) |
| SSD 고장 교체 | AI가 진단, 교체는 수동 | 예외 상황 |
사람이 개입하는 건 물리적 한계(USB 삽입)와 진짜 예외(하드웨어 고장)뿐이다. 이것이 L3의 정의 — "Plan-Execute, 예외 시만 사람" — 에 해당한다.
자율주행이 L2에서 L5로 가는 데 10년 걸렸다. 자율제조는 AI PDCA 가속 덕분에 훨씬 빠르게 진화할 수 있다 — 실제로 이 프로젝트에서 수 주 만에 L2→L3 진입을 경험했다.
15. $75 셀 — 프로토 공정 프레임워크
┌──────────────────────────────────────┐
│ Proto Process Framework │
│ │
│ ┌────────┐ ┌────────┐ ┌────────┐ │
│ │ Cell 1 │ │ Cell 2 │ │ Cell 3 │ ...│
│ │ ESP32 │ │ ESP32 │ │ ESP32 │ │
│ │ Robot │ │ Robot │ │ Robot │ │
│ │ HID │ │ HID │ │ HID │ │
│ └───┬────┘ └───┬────┘ └───┬────┘ │
│ └──────────┼──────────┘ │
│ Edge AI Hub │
│ 오케스트레이터 │
│ + Claude API │
│ + 경험 DB │
└──────────────────────────────────────┘
셀 1대 원가: ESP32-CAM $5 + 로봇 $30 + Pico $4 + 전자 스위칭 $4 (구상) + HDMI 캡처 $10 = ~$75/셀 (목표)
적용 가능한 시나리오
| 분야 | 작업 |
|---|---|
| IT 인프라 | PC N대 OS 설치 |
| 교육 | 실험 장비 셋업 반복 |
| 품질 검사 | 외관/기능 검사 |
| 연구실 | 시약 투입/측정 반복 |
| 수공업 | 조립/포장 반복 |
산업용 로봇은 비싸고, 대기업만의 것이었다. $75 셀 + AI = "누구나 생산기술 엔지니어"
16. 성능 비교 요약
Edge vs Cloud
| 지표 | Cloud LLM (Claude) | Edge 규칙 엔진 | 배율 |
|---|---|---|---|
| 추론 시간 | 7,435ms | 84ms | 88x |
| 정확도 | 100% (기준) | 100% | 동일 |
| 네트워크 | 필수 (인터넷) | 불필요 (오프라인) | - |
| 비용/호출 | ~$0.01 | $0 | ∞ |
PDCA 가속
| 지표 | 레거시 생산기술 | AMFX (AI+전자제어) | 배율 |
|---|---|---|---|
| 1 PDCA 사이클 | 6~18주 | 수 분 | ~1000x |
| 측정 → 분석 | 사람 집계 (시간~일) | HDMI+OCR+AI 즉시 (초) | ~100x |
| 변경 반영 | 물리 재가공 (일~주) | GPIO/코드 수정 (초~분) | ~1000x |
| 야간/주말 | 작업자 부재 → 중단 | 무인 연속 가동 | ∞ |
| 재현성 | 작업자별 편차 | 동일 코드 = 동일 결과 | 100% |
17. 우리가 배운 것
1. 공정을 만들면 난제는 자연 발생한다 — 선택이 아니라 발견
2. 한계에 부딪히면 AI가 "다른 길"을 제안한다 — 그게 더 싸고 빠르다
3. 실패할수록 빨라진다 — 실패가 즉시 다음 PDCA의 입력
4. 기술을 쌓는 것보다 문제를 재정의하는 것이 답이었다
핵심 한 줄
"수작업을 공정으로, 공정을 자율 생산라인으로"
Team Davinci — Industrial Edge AI Solution Challenge 2026 AMFX: Autonomous Manufacturing Framework with Edge AI
- 첨부파일
- DK_INVOICE_121288854_redacted.pdf 다운로드
로그인 후
참가 상태를 확인할 수 있습니다.