e4ds Connect
- 제 목 [로봇팔 제어 프로젝트 3] 조이스틱 입력값 확인 테스트
- 작성자 이은* 조회 : 8,428 좋아요 : 0 댓글 : 0
- 작성일 2019-11-14 오전 11:02:03
- 첨부파일 joystick_check.ino
-
본 실습을 통해 아날로그 입력과 조이스틱 센서에 대해 이해한다.
준비물 : Arduino, 조이스틱 1개
내용 : 조이스틱을 아두이노에 연결하여 조이스틱의 조종에 따라 아날로그 입력값이 어떤 식으로 입력되는지 시리얼 모니터를 통해 확인한다. 이 실습을 통해 조이스틱을 움직였을 때 아날로그 값이 어떻게 변하는지 확인하고 이를 토대로 서보모터가 움직일 수 있게 하는 아날로그 값의 범위를 결정한다.
회로 연결은 다음과 같다.
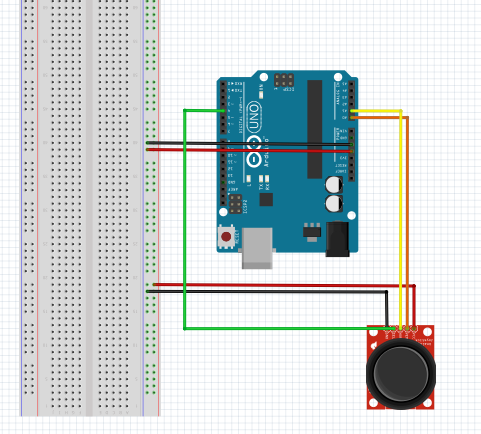
실제 실습은 조이스틱 9핀을 사용하였지만 fritzing에는 없으므로 일반적으로 사용하는 5핀짜리 조이스틱을 fritzing에서 사용하였다.
조이스틱은 x, y 축으로 아날로그 입력이 가능하고, z 축으로 버튼을 누르면 디지털 입력이 가능하다. x축을 담당하는 VER핀을 A0번에 연결하였고, y축을 담당하는 HOR핀을 A1핀에 연결하였다. 또한 z축 디지털 입력을 담당하는 SEL핀을 4번핀에 연결하였다.
코드는 다음과 같다.
#include <Servo.h> //헤더파일 포함 const int X_AXIS = A0; //x축 아날로그 입력핀 0번 지정 const int Y_AXIS = A1; //y축 아날로그 입력핀 1번 지정 void setup() { // put your setup code here, to run once: Serial.begin(9600); //시리얼 모니터 사용 } void loop() { // put your main code here, to run repeatedly: int xVal = analogRead(X_AXIS); //X축값 읽음 int yVal = analogRead(Y_AXIS); //Y축값 읽음 int pushBtn = digitalRead(4); Serial.print("Btn : "); Serial.print(pushBtn); Serial.print(" "); Serial.print("X: "); Serial.print(xVal); Serial.print(" "); Serial.print("Y : "); Serial.println(yVal); delay(500); }동작영상
| 순번 | 제목 | 등록자 | 등록일 | 조회 |
|---|---|---|---|---|
| 53 | [웨비나] 라즈베리 파이 Pico W IoT 개발 환경 구축하기 ㅡ Part 2 | E4DS MAKE | 22.09.06 | 10741 |
| 52 | [웨비나] 라즈베리 파이 Pico W IoT 개발 환경 구축하기 ㅡ Part 1 [6] | E4DS MAKE | 22.09.06 | 12431 |
| 50 | [무료 강좌] 5분안에 끝내는 그라운드의 이해 | E4DS MAKE | 22.07.29 | 17030 |
| 49 | [무료 강좌] 그라운드가 있는 이유, 그리고 전압과 전류에 대한 이야기 | E4DS MAKE | 22.07.29 | 12226 |
| 47 | [무료 강좌] 7세그먼트 디스플레이에 관한 진실 | E4DS MAKE | 22.07.29 | 12153 |
| 35 | 라즈베리파이 4 OpenCV 4.1.2 ( opencv_contrib 포함 ) 설치하기 [4] | 주피터 | 19.12.12 | 43678 |
| 34 | [로봇 팔 제어 프로젝트] STM32 MCU를 활용한 원격 로봇 팔 제어 [1] | Dongdon | 19.12.10 | 30794 |
| 33 | [로봇 팔 제어 프로젝트] 블루투스 통신을 이용한 6관절 로봇 팔 제어 | Dongdon | 19.12.09 | 12072 |
| 32 | [STM32 MCU 제어 가이드] 버튼 입력 – LED 출력 동작 제어 [2] | Dongdon | 19.11.25 | 10641 |
| 31 | 블루투스 모듈 Set-up 및 블루투스 통신을 이용한 서보모터 제어 | dmsrn13** | 19.11.20 | 12502 |