라이다(Lidar)는 광대역에서 전자기파를 발생시키는 레이더의 한 형태이다.
지난 몇 년 동안 한 가지 형태의 특정 라이다인 ToF(Time-of-Flight) 거리 측정이 널리 사용되어 왔다. 레이저가 광학 소스로 사용되면, 먼 거리에 있는 작은 부분까지의 거리도 측정할 수 있다. 조정 가능한 광학장치와 함께 사용하면, 해당 지점까지의 거리를 측정하고, 객체의 3차원 맵을 구현할 수 있다.
EPC는 라이다 시스템에 eGaN FET의 성능을 제공하고, 라이다의 기술 수준을 향상시키기 위해 EPC9126 및 EPC9126HC 레이저 드라이버를 개발했다. 이 레이저 드라이버의 기본 원리는 간단해 보이지만, 많은 엔지니어들이 설계에서 무시하는 기생 컴포넌트들이 고속, 고전압, 고전류 특성을 갖게 한다.
본 기술 기고문은 사용자가 드라이버를 최대한 활용할 수 있도록 레이저 드라이버 디자인에 대한 심도 깊은 정보를 제공하고, 일반적으로 제기되는 질문에 답을 제시하기 위해 작성되었다.
기본 디자인 프로세스
이제 공진형 라이다 드라이버 설계를 수행하기 위해
전 기사에서 다뤘던 정보들을 활용할 수 있다. 일반적으로 시스템 설계에서 요구되는 일부 레이저 펄스사양으로 시작해 보자.
요구사항은 다음과 같다:
▲펄스 피크 진폭 I
DLpk
▲FWHM(Full Width Half Maximum) 펄스 폭 t
w
▲펄스 반복 주파수 PRF
▲레이저 다이오드 전압 강하 V
DLF
기본 펄스 요구사항이 선택되면, 설계를 완료하는데 필요한 다음 요소는 전력 루프 인덕턴스 L
1이다. L
1의 결정은
전 기사에서 논의되었지만, 지금은 좋은 추정 값을 가지고 있다고 가정하도록 하자.
공진형 커패시터 C1의 값을 결정하기 위해 방정식 (4)와 (6)을 사용해 다음을 얻을 수 있다.
재충전 레지스터 R1의 값은 (2)에서 결정되므로 다음과 같다.
τchrg≫tres이기 때문에 τchrg의 충분한 값을 선택하기만 하면 된다. 일반적으로 펄스 듀티 사이클이 1% 미만이 되도록 열 제한이 이뤄져야 하기 때문에 R1 값은 보통 정밀한 결정이 필요하지는 않다.
마지막으로 필요한 버스 전압 V
IN은 방정식 (7)을 통해 결정되며, 또한 FET Q
1에 적합한 부품번호를 선택하는데 I
DLpk를 함께 사용한다. 방정식 (7), (8), (9)를 통해 설계를 완료하는데 필요한 나머지 값을 결정한다.
전력 루프 인덕턴스 결정
우리는 이미 필요한 입력 전압이 레이저 인덕턴스 대비 거의 선형적으로 증가하고, 입력 전압이 FET와 커패시터의 정격을 결정한다는 것을 보았다.
또한 레이저 드라이버 버스 전압은 다른 곳에서 나오게 되는데, 회로의 다른 부스트 컨버터에서 나왔을 가능성이 높다. L
1이 감소할수록 나머지 설계는 더 간단하고 저렴해진다.
PCB 인덕턴스를 최소화하는 핵심 원리는 참고자료
1)에 자세히 설명되어 있으며, 레이아웃 인덕턴스를 줄이기 위한 여러 유용한 기법들이 소개되어 있다.
이 자료는 eGaN FET의 칩 스케일 패키지로 FE T, PCB, 버스 커패시턴스, 전류 감지 션트(필요한 경우)의 전력 루프 인덕턴스에 대한 기여도를 1nH 미만으로 유지할 수 있으며, 500pH 미만의 값에 접근할 수 있음을 보여주고 있다.
EPC9126xx의 부유 인덕턴스는 FET 및 장착 위치 부하에 따라 1nH 정도이다. 이 값은 특히 각기 다른 레이저 패키지를 수용할 수 있도록 설계의 다양성을 높이기 위한 절충안이기 때문에 달성 가능한 최상의 값보다 더 높은 것이다.
이제 다른 인덕턴스 소스를 살펴보자.
주요 소스 중 하나는 레이저이다. 앞서 살펴본 바와 같이 스루홀 레이저는 최상의 경우에 약 5nH를 기여할 것으로 예상되지만, 이보다 훨씬 높은 경우가 많다. 표면실장 레이저는 약 1~3nH에 가깝게 기여하며, 이는 레이저가 압도적인 인덕턴스 소스가 됨을 의미한다.
레이저 인덕턴스의 대부분은 와이어 본딩을 포함한 레이저 패키지에서 발생한다. 레이저 제조업체들은 레이저 패키지 인덕턴스가 성능을 압도할 수 있다는 사실을 잘 알고 있기 때문에 가까운 미래에 이 분야에서도 발전이 이뤄질 것으로 기대된다.
불행하게도 L
1의 값은 설계 초기에 정확히 알기 어렵다. 따라서 일부 반복 작업이 필요할 수도 있다. 초기 설계에서 FET에 추가 전압 마진을 고려함으로써 예상치 못한 인덕턴스를 어느 정도 극복할 수 있다.
EPC9126xx 하드웨어 드라이버 설계
EPC9126xx 레이저 드라이버를 위한 일반적인 연결 다이어그램은 [그림 8]에 나와 있다.
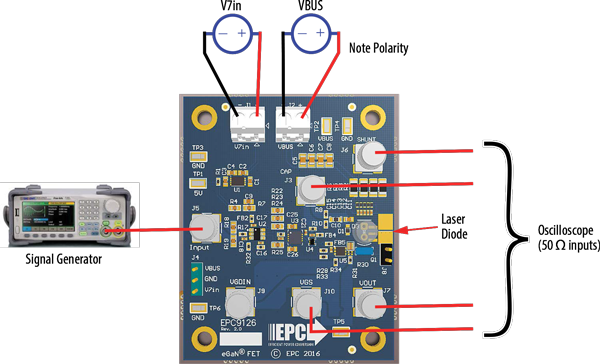
▲[그림8]
연결 및 동작에 대한 완벽한 설명은 퀵 스타트 가이드
2)3)에서 확인할 수 있으며, 여기에서는 이 다이어그램을 간략하게 검토하도록 하겠다.
모든 신호 I/O는 SMA 커넥터를 사용한다. 이 설계에는 J3, J7, J9, J10에서 얻은 출력과 임베디드 전송 라인 프로브로 구성된 전압 테스트 포인트가 포함되어 있다. 전류 측정 션트의 출력은 J6을 사용할 수 있다.
설계의 세부사항은 거버(Gerber) 레이아웃 파일과 전체 회로도를 비롯해 참고자료
4)5)에서 확인할 수 있다. 레이아웃은 참고자료
1)에서 설명한 원리에 따라 전체 인덕턴스를 최소화하도록 설계되었다.

▲[그림9] 실험 검증을 위한 GaN FET 기반
EPC9126 레이저 드라이버
드라이버의 사진과 설계의 핵심 부분에 대한 확대도는 [그림 9]에 나와 있다.
인덕턴스 L1을 최소화하기 위해 에너지 저장 커패시터 C1(PCB 상의 C11, C12, C13, C14, C15) 및 전류 측정 션트(R12, R13, R14, R15, R16)는 병렬로 연결된 5개의 0402 사이즈의 표면실장 패키지로 구성되어 있다.
상단 면과 접지 면의 간격은 250μm(10mil)로 인덕턴스를 최소화한다. 비용을 최소화하기 위해 블라인드와 매설, 마이크로비아는 사용되지 않았다.
전류 측정을 위해 우수한 션트 성능을 얻기 위해 션트 저항을 거꾸로 장착해야 했으며, 션트 등가 직렬 인덕턴스는 200pH~40pH까지 감소하고, 이에 따른 션트 대역폭은 4배 증가하는 것으로 나타났다.
6) 이와 관련한 추가 논의는 전류 감지 부분에서 자세히 설명하도록 하겠다.
실험 결과
EPC9126 및 EPC9126HC는 모두 이 글의 작성 시점에 즉시 사용 가능한 가장 낮은 인덕턴스 표면실장형 고출력 펄스 레이저인 엑셀리타스(Excelitas)의 TPGAD1S09H 표면실장형 레이저로 테스트되었다. 각각의 경우, 회로 테스트 결과, 75V의 입력 전압이 나왔다.
EPC9126
전력 루프 인덕턴스 L
1은 2.3nH로 추산되었다. I
DLpk=35A 및 3.5ns 펄스폭으로 설계하면, C
1=1.2nF 및 V
IN=60V가 된다. 커패시터 값은 표준 부품 값으로 얻을 수 있는 가장 근접한 값인 C
1=1.1nF가 사용되었다. NP0/C0G 세라믹 커패시터는 안정적인 커패시턴스와 낮은 손실 때문에 사용되었다.

▲[그림 10] VIN=75V의 EPC2016C GaN FET를 장착한 EPC9126 레이저 드라이버 실험 결과. 피크 전류 IDLpk=35A는 tw=3.4ns에서 도달됐다
V
IN=75V에 대한 테스트 결과는 [그림 10]에 나와 있다. 피크 전류, I
DLpk=35A는 t
w=3.4ns로 도달한다. 이는 레이저 P
DLpk>300W에 대한 최대 전력 입력량에 해당한다. 결과치와 계산의 불일치는 다른 커패시턴스 값과 인덕턴스 추정 오차, 션트에서의 추가 전압강하 및 레이저 다이오드 전압 강하가 실제로 고정된 값이 아니기 때문에 발생한다.
EPC9126HC
전력 루프 인덕턴스 L
1은 2.0nH로 추산되었으며, EPC2016C에 비해 EPC2001C의 더 넓은 풋프린트로 인해 감소되었다. I
DLpk=70A 및 5ns 펄스폭으로 설계하면, C
1=2.85nF 및 V
IN=78V가 된다. 커패시터 값은 표준 부품 값으로 얻을 수 있는 가장 근접한 값인 C
1=2.8nF가 사용되었다. NP0/C0G 세라믹 커패시터는 안정적인 커패시턴스와 낮은 손실 때문에 사용되었다.

▲[그림 11] VIN=75V의 EPC2001C GaN FET를 장착한 EPC9126HC 레이저 드라이버의 실험 결과. 피크 전류 IDLpk=63A는 tw=5.0ns에서 도달됐다
V
IN=75V에 대한 테스트 결과는 [그림 11]에 나와 있다. 피크 전류, I
DLpk=63A는 t
w=5.0ns로 도달한다. 이는 레이저 P
DLpk>1300W에 대한 최대 전력 입력량에 해당한다. 결과치와 계산의 불일치는 약간 다른 커패시턴스 값과 인덕턴스 추정 오차, 션트에서의 추가 전압 강하 및 레이저 다이오드 전압 강하가 실제로 고정된 값이 아니기 때문에 발생한다.
9126에 대한 도움말 및 유용한 정보
EPC9126xx는 유연성이 뛰어나기 때문에 새로운 아이디어를 시도하거나 빠르고 높은 전류 펄스에 대한 실제 부품 동작을 자세히 파악하는데 사용할 수 있다. 이 섹션에서는 설계에 대한 세부 정보와 함께 각기 다른 방향에 대한 제안을 추가로 논의하고자 한다.
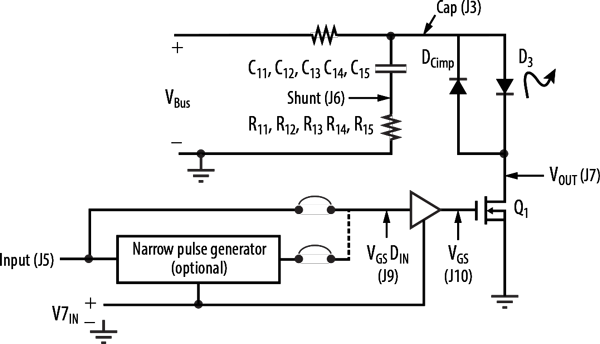
▲[그림 12] EPC9126xx 블록 다이어그램
[그림 12]는 EPC9126xx의 블록 다이어그램이며, 이 섹션에 대한 유용한 레퍼런스를 제공한다.
다음 마지막 회에서는 레이저 펄스 드라이버의 빠른 속도를 위해 RF 기법, 특히 제어 임피던스와 케이블 및 측정을 위한 50Ω의 표준 임피던스 사용에 대해 알아보도록 하겠다.
참고자료
1) D. Reusch and J. Strydom, “Understanding the effect of PCB layout on circuit performance in a high frequency gallium nitride based point of load converter,” 2013 Twenty-Eighth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), 2013, pp. 649–655.
2) Efficient Power Conversion Corp., “EPC9126 Lidar Development Board Quick Start Guide, Rev. 2.5,” 2016.
3) Efficient Power Conversion Corp., “EPC9126HC Lidar Development Board Quick Start Guide, Rev. 1.0,” 2017.
4) EPC9126 Lidar Demo Board (https://epc-co.com/epc/Products/DemoBoards/EPC9126.aspx)
5) EPC9126HC Lidar Demo Board (https://epc-co.com/epc/Products/DemoBoards/EPC9126.aspx)
6) J. Glaser, “ High Power Nanosecond Pulse Laser Driver using a GaN FET”, PCIM Europe 2018 Proceedings, 2018.
#본 기사에 관하여 e4ds.com에서는 라이다를 위한 GAN 기술에 대하여 실험적 논의를 수행중에 있습니다. 본 기술에 관한 질문이나 추가 기고를 원하는 경우 아래에 댓글을 달아주시기 바랍니다.






.png)
