라이다(Lidar)는 광대역에서 전자기파를 발생시키는 레이더의 한 형태이다.
지난 몇 년 동안 한 가지 형태의 특정 라이다인 ToF(Time-of-Flight) 거리 측정이 널리 사용되어 왔다. 레이저가 광학 소스로 사용되면, 먼 거리에 있는 작은 부분까지의 거리도 측정할 수 있다. 조정 가능한 광학장치와 함께 사용하면, 해당 지점까지의 거리를 측정하고, 객체의 3차원 맵을 구현할 수 있다.
EPC는 라이다 시스템에 eGaN FET의 성능을 제공하고, 라이다의 기술 수준을 향상시키기 위해 EPC9126 및 EPC9126HC 레이저 드라이버를 개발했다. 이 레이저 드라이버의 기본 원리는 간단해 보이지만, 많은 엔지니어들이 설계에서 무시하는 기생 컴포넌트들이 고속, 고전압, 고전류 특성을 갖게 한다.
본 기술 기고문은 사용자가 드라이버를 최대한 활용할 수 있도록 레이저 드라이버 디자인에 대한 심도 깊은 정보를 제공하고, 일반적으로 제기되는 질문에 답을 제시하기 위해 작성되었다.
9126에 대한 도움말 및 유용한 정보
전 기사에 이어 다시 짚고 넘어가자. EPC9126xx는 유연성이 뛰어나기 때문에 새로운 아이디어를 시도하거나 빠르고 높은 전류 펄스에 대한 실제 부품 동작을 자세히 파악하는데 사용할 수 있다. 이 섹션에서는 설계에 대한 세부 정보와 함께 각기 다른 방향에 대한 제안을 추가로 논의하고자 한다.
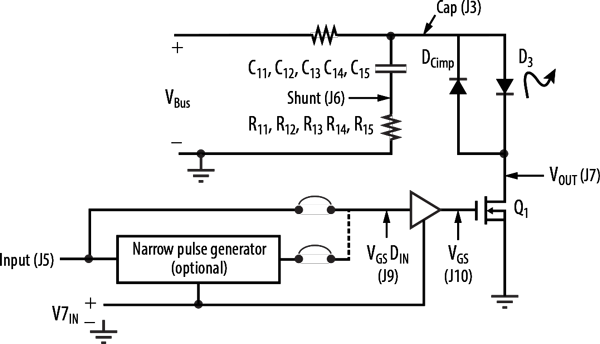
▲[그림 12] EPC9126xx 블록 다이어그램
[그림 12]는 EPC9126xx의 블록 다이어그램이며, 이 섹션에 대한 유용한 레퍼런스를 제공한다.
입력 및 출력
레이저 펄스 드라이버의 빠른 속도를 위해서는 RF 기법, 특히 제어 임피던스와 케이블 및 측정을 위한 50Ω의 표준 임피던스 사용이 필요하다. 이것이 무엇을 의미하는지 확실하지 않다면, 시작하기에 좋은 레퍼런스
1)가 있다. 이번 주제에 익숙하지 않은 사람들에게 좋은 참고자료가 될 것이다.
입력은 낮은 인덕턴스 50Ω 저항(병렬로 연결된 두 개의 100Ω 레지스터)으로 터미네이션되며, 2.5V의 임계값을 갖는 비교기에 직접 공급된다. 50Ω 케이블과 펄스 생성기를 연결하면, 최소한의 링잉 및 반사가 이뤄진다.
로직 게이트로 이 보드를 직접 구동하고자 한다면, 많은 로직 게이트의 출력 임피던스가 수백 옴(ohms; Ω)이 될 수 있다는 점을 명심해야 한다. 즉, 충분히 높은 전압으로도 입력이 구동되지 않는다. 이 경우 입력 종단 저항을 제거할 수 있지만, 로직 게이트와의 연결은 모든 링잉 및 펄스 반사를 최소화하는 방식으로 이뤄져야 한다. 익숙하지 않은 경우 위에서 언급한 레퍼런스를 참조하면 된다.
모든 출력은 50Ω 부하로 올바르게 작동하도록 설계되었다. 이는 50Ω의 내부 입력을 갖는 오실로스코프와 연결된 50Ω 케이블을 사용하는 것이 가장 좋다. 스코프 입력을 1MΩ으로 설정하고 스코프 입력에 외부 50Ω 터미네이션을 사용하면 동작하지만, 1MΩ 입력 연결의 일반적인 입력 커패시턴스로 대역폭이 제한된다. 이 커패시턴스는 측정 대역폭을 <200MHz으로 제한하여 최소측정 상승시간이 1ns 정도에 이르게 되는데, 이는 실제 동작보다 훨씬 느리게 보일 수 있다.
레이저 장착
EPC9126xx는 레이저나 다른 부하의 패키징 및 장착이 유연하도록 설계되었다. 납땜 레이저 다이오드 패키지를 장착할 수 있도록 100mil 간격의 스루홀을 가지고 있다. 또한 엑셀리타스의 표면실장형 레이저 다이오드를 위한 풋프린트도 제공된다.
마지막으로 다른 패키지나 베어 레이저 다이도 유연하게 탑재할 수 있는 베어 패드를 갖추고 있다. [그림 13]은 레이저를 장착할 수 있는 몇 가지 방법을 보여준다.

▲[그림 13] EPC9126xx에 레이저 또는 다른 부하를 장착하는 다양한 방법들. 왼쪽 위는 기존 스루홀 장착 방식이며, 오른쪽 위는 레이저 양극 리드가 상단에 있고 음극 리드는 PCB 하단에 있다. 왼쪽 아래는 레이저의 모든 리드가 위쪽에 있다. 오른쪽 아래는 표면실장형 레이저다
공진형 커패시터
인덕턴스가 최소화되면, 설계자가 제어할 수 있는 주요 파라미터는 전압과 공진 커패시턴스이다. 공진형 커패시터는 NPO/C0G 세라믹 유전체가 되거나 또는 도기나 유리, 운모와 같이 낮은 손실과 선형성 및 안정적인 유전체를 갖춘 다른 커패시터이어야 한다.
충전 저항
공진형 커패시터는 (1)에서 주어진 시간 상수 τ
chrg로 충전 저항 R
1(EPC9126xx의 R
2, R
3, R
5, R
6의 병렬 조합으로 구성됨)을 통해 충전된다.
최종 값의 >99%까지 공진 커패시터를 충전하는데 t=5τ
chrg가 소요되기 때문에 최대 펄스 반복 주파수를 PRF=1/5•τ
chrg로 설정할 수 있다. 설계자가 보다 높은 PRF 값을 원하면, 레이저 출력이 약간 저하되는 것을 허용하거나 R
1 값을 줄일 수 있다. R
1이 줄어들면, Q
1이 켜지면서 추가 전류가 흐르게 되지만, 5τ
chrg≫t
w의 경우 허용될 수 있는 수준이다.

▲[그림5] 정전용량식 방전 공진형 드라이버
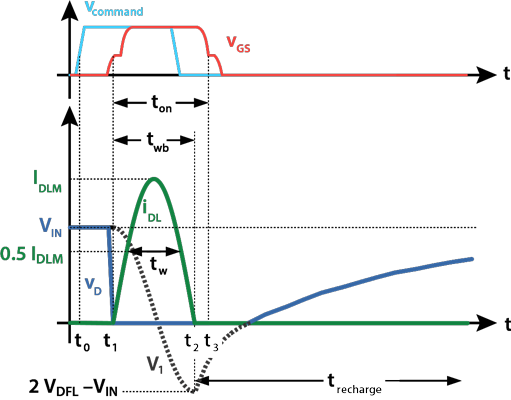
▲[그림 6] [그림 5]의 주요 파형
[그림 5]에 나타난 이상적인 공진형 시스템과 [그림6]의 관련 파형의 경우, 커패시터 C
1이 맨 처음 충전되는 것을 제외하고, 커패시터의 초기상태는 V
C1(t2)=V
IN–2V
DFL이 되는 것을 알 수 있다. 이는 재충전 시의 아주 좋은 근사치이다. 모든 전력은 R
1에서 소실되며, R
1에서 소산된 에너지는 다음과 같다:

이는 R
1과는 독립적이며, 전력 소실은 다음과 같다:

높은 PRF에서 전력 소실은 상당할 수 있으며, 레이저 자체의 전력 소실에 추가된다. 전력 소실이 너무 큰 경우, 부스트 컨버터와 같은 다른 재충전 방법을 고려해야 한다. 이는 이 글의 범위를 벗어나는 사항으로 여기에서는 언급하지 않겠다.
전송 라인 프로브
션트 측정을 제외한 모든 감지 측정 SMA는 서브 ns 시간대의 파형 충실도를 얻기 위해 전송 라인 전압 프로브 원리를 이용한다. 이러한 프로브는 일반적으로 500 ~ 5k 정도의 비교적 낮은 프로빙 임피던스를 갖게 되지만, 이 임피던스는 거의 순수 저항성이며, 대역폭은 수 GHz로 매우 높아질 수 있다.
이 프로브는 PCB에 내장되어 관심있는 노드와 이상적으로 연결할 수 있기 때문에 파형 충실도 및 재연성을 향상시킨다. 또한 회로에서 고전압을 측정할 때 중요하게 고려해야 할 점은 측정 포인트에서 벗어나지 않는 것이다. 이러한 프로브의 기본 원리는
2)에 자세히 설명되어 있다.
내장된 프로브로 유용한 측정을 수행하기 위해서는 다음 세 가지 특성을 고려해야 한다.
첫째, 스코프 입력을 50Ω으로 설정한 오실로스코프와 연결해야 한다. 1MΩ 입력을 50Ω 터미네이터와 사용하면 거의 모든 스코프의 대역폭이 심각하게 제한되기 때문에 권장하지 않는다.
둘째, 각 내장 프로브에는 반드시 고려해야 할 자체 감쇠계수가 있다.
셋째, 프로브의 임피던스가 낮다는 것은 평균 DC 전압, 즉 드레인 전압이 큰 지점에서 상당한 전력 소실이 발생할 수 있음을 의미한다.
이러한 소실을 방지하기 위해 고전압 측정을 위한 테스트 포인트에는 DC 블로킹 커패시터를 포함한다. 이는 일반적인 관심 파형에 거의 영향을 미치지 않는 고대역통과 필터를 형성한다. 그러나 긴 펄스폭이 사용되면, 이러한 테스트 포인트에서 잘못된 결과가 초래될 수 있기 때문에 외부 프로브를 사용해야 한다.
내장 전송 라인 프로브는 텍트로닉스의 P9158 3GHz 전송 라인 프로브
3)와 거의 동일한 결과를 도출하는 것으로 검증되었기 때문에 예상 대역폭은 최소 3GHz이다.
전류 감지
전류 감지는 전력 전자에서 가장 어려운 문제다. 펄스 레이저 드라이버의 전류 감지는 장단점을 모두 가지고 있다. 장점은 동작 검증, 레이저 펄스의 타이밍 결정, 그리고 눈의 안전을 보장하면서도 범위를 최대화하는 광 파워 제어 등이 있다.
전류 감지는 그러나 많은 단점도 가지고 있다. 인덕턴스 추가, 전력소실 증가, 파형 정확도 저하, 비용부담, 그리고 인덕턴스를 극복하기 위한 레이저 드라이브 전압 감소 등을 들 수 있다.
전류 측정 기능은 추가된 전력 루프 인덕턴스를 최소화하기 위해 4개의 0402 저항으로 구성된 저항성 전류 션트의 형태로 EPC9126xx에 포함되어 있다. 레이저 드라이버의 낮은 듀티 사이클을 통해 이러한 소형 저항을 매우 높은 전류에서도 사용할 수 있다.
성능에 부정적인 영향을 최소화하면서도 경제적인 전류 감지 기능을 포함시키기 위해 전류 션트 성능을 절충하는 경향이 있는데, 이로 인해 전류 파형의 상당한 왜곡이 초래될 수 있다.
일반적으로 높은 피크 전류로 인한 전압 강하를 최소화하기 위해서는 매우 작은 저항 값의 션트를 사용하는 것이 바람직하다. 불행하게도 병렬로 연결된 5개의 0402 사이즈 저항의 매우 작은 인덕턴스조차 션트 임피던스와 측정 자체에 큰 영향을 미칠 수 있다.
에지 전이 시간 t
t=2ns의 직사각형 펄스를 가정하여 이러한 영향을 보수적으로 추산할 수 있다. 최대 3dB 대역폭의 펄스를 다음 방정식으로 계산할 수 있다:

L
1shunt로 표시되는 션트의 부분적인 인덕턴스 기여도는 레이저 다이오드를 PCB 상에 평평하게 장착할 수 있는 동판으로 대체하고, Q
1의 스위칭이 시작될 때의 발진 주파수를 통해 추산했다. 이는 L
1shunt=1.21nH가 산출되었다.
그런 다음 션트 저항을 거꾸로 장착하여 인덕턴스를 평가했으며, 마지막으로 션트 저항을 동판으로 교체하여 측정했다. 이 결과는 [표 2]에 나와 있다.
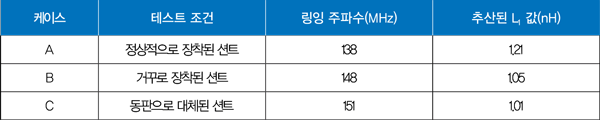
▲[표 2] 션트 인덕턴스 측정
[표 2]에서는 션트가 없는 경우와 비교하여 정상적으로 장착된 션트 저항의 경우 L
shunt,A=200pH, 거꾸로 장착된 션트의 경우 L
shunt,B=40pH가 산출된 것을 확인할 수 있다. f
w=175MHz에서 L
shunt,A에 대한 유도 리액턴스(Inductive Reactance)는 다음과 같다:

션트의 저항 값은 유도 리액턴스의 최소 5배 이상이어야 하며, R
shunt,A≥1.1Ω에 해당된다. 그 결과 피크 전류에서 39V의 전압 강하가 발생하며, 이는 트랜지스터 정격 전압의 40%에 이른다. 션트 저항을 거꾸로 장착하여 이를 5배까지 줄임으로써 R
shunt,B≥0.22Ω를 얻을 수 있다. 최종 값 R
shunt=0.20Ω은 부품의 가용성을 기반으로 선택된 것이다.
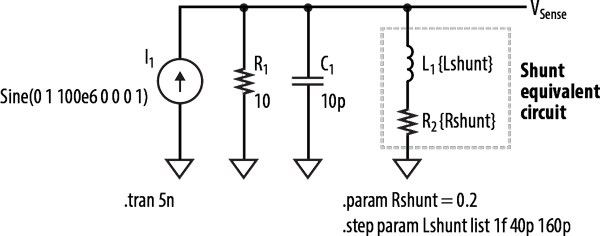
▲[그림 14] 일반적인 션트 등가 회로의 시뮬레이션 모델
파형에 미치는 영향을 확인하기 위해 [그림 14]는 위에서 언급한 3가지 경우에 대해 t
w=3.3ns로 수행되는 간단한 션트 시뮬레이션 회로를 보여주고 있다. [그림 15]는 이에 대한 결과이다. 200pH의 작은 값(PCB 상에 병렬로 연결된 0402 저항)이라 하더라도 짧은 펄스에 대해 상당한 오류를 유발할 수 있다는 것을 확인할 수 있다.
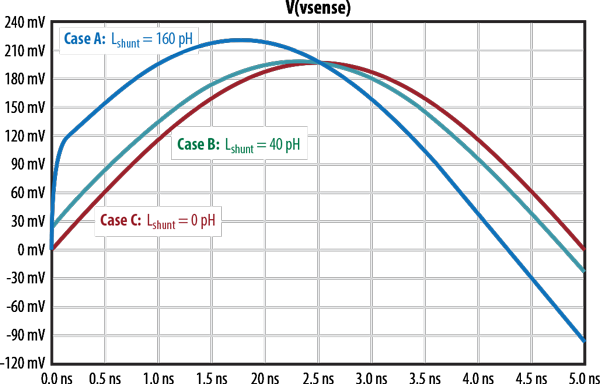
▲[그림 15] 션트 직렬 인덕턴스의 3가지 값에 대한 [그림 14]의 시뮬레이션 모델 결과
인덕턴스의 영향은 전류 신호의 일부를 차별화하여 파형의 초기 부분과 피크를 과장시킨다. 펄스가 짧아지면 이러한 오류는 더욱 심각해진다.
불행히도 경제적으로 저항을 거꾸로 설치하기가 어렵기 때문에 케이스 A에 해당하는 보드가 선적되고 있다. 충분한 상업적인 인센티브가 있다면, 이러한 업체를 찾을 수도 있을 것이다. 한 제조업체는 이미 이렇게 진행하고 있지만, 유감스럽게도 이 글의 작성시점에 제공되는 최대값은 측정하기에 너무 작다.
4)
보다 정확한 전류 측정이 필요한 경우, 저항을 거꾸로 다시 장착하거나 더 큰 값이 필요하며, 두 가지 모두 요구될 수도 있다. 오실로스코프에 프로그램이 가능한 주파수와 단극 차단 기능이 있는 저대역통과 필터 기능이 있다면, 더 정확한 결과를 얻기 위해 동일한 주파수에서 극이 있는 전류 션트의 응답을 제로로 취소해야 할 것이다.
듀얼 에지 제어
논의한 바와 같이, 공진형 정전용량식 방전 레이저 드라이버는 몇 가지 유용한 특성을 가지고 있다. 그러나 이들은 주어진 전력 루프 인덕턴스에 대해 중대한 한계를 가지고 있다. 즉 펄스 높이는 제어할 수 있지만 펄스 폭은 제어할 수 없다는 것이다. 또한 펄스 폭은 총 펄스 에너지를 제어하는데 사용될 수 있으며, 개별 펄스에 대해 이러한 제어가 필요한 경우 펄스 진폭보다 제어하기가 더 쉽다.
일부 경우에는 레이저 다이오드 또는 다른 부하를 PCB에서 분리해야 한다. 이는 상당한 인덕턴스를 추가할 수 있는 일련의 상호 연결을 필요로 한다. 이러한 제한 사항 중 일부를 해결하기 위해 듀얼 에지 제어, 즉 드라이브 FET의 턴온 및 턴오프 모두 펄스 형태를 제어하는데 사용된다.
듀얼 에지 제어 기능이 있는 EPC9126xx를 사용하기 위해서는 사양으로 명시되어 있지는 않지만 최소 펄스폭이 약 6ns를 가지고 있는 UCC27611 게이트 드라이브의 한계에 대해 먼저 파악하고 있어야 한다. 이는 펄스길이를 제한한다.
일반적인 듀얼 에지 제어 애플리케이션의 경우 공진형 커패시터 및 충전 저항을 변경해야 할 수도 있다. 전류가 제한되어야 하는 경우, PCB의 버스 전압 입력에 추가 버스 커패시턴스가 있기 때문에 충전 저항을 이 용도로 사용할 수 있다.
마지막으로 스위치가 턴오프되면, 전력 루프 인덕턴스의 전류가 차단되어 FET 및 레이저 다이오드 또는 다른 부하에 링잉 및 오버슈트가 발생할 수 있다는 점을 고려해야 한다. 이러한 링잉은 인덕턴스 및 턴오프 시간의 전류, 레이저와 FET, PCB의 커패시턴스에 따라 달라진다.
전압 오버슈트를 제어하기 위해 일부 클램프 다이오드를 추가해야 할 수도 있다. 적합한 클램프 다이오드를 찾는 것은 매우 어렵다. 대부분의 다이오드는 전력 루프 인덕턴스와 유사한 패키지 인덕턴스를 가지고 있기 때문에 응답 속도를 제한하게 된다.
클램프 전류가 높으면, 이를 처리하기 위한 더 큰 다이오드는 부가적인 링잉을 유발하는 상당한 커패시턴스를 가질 수 있으며, 경우에 따라 바람직하지 않은 레이저 펄스가 반복적으로 유발될 수 있다.
듀얼 에지 애플리케이션에 EPC9126xx를 사용할 때는 신중한 시뮬레이션과 실험을 모두 계획하는 것이 좋다. 특히 실험이 중요하다. 경험적으로, 필요한 전압 및 전류 정격을 갖는 다이오드를 선택할 때 현재 공급되고 있는 모델들은 라이다 애플리케이션에서 요구되는 매우 짧은 전이에 대한 다이오드 동작을 정확하게 설명하고 있지 못하다.
좁은 펄스 발생기
짐 윌리엄스(Jim Williams)의 전통적인 설계방식을 기반으로 EPC9126xx에도 좁은 펄스 발생기가 포함되어
5) 있다. 기본적으로 이 회로는 활성화되지 않고, 펄스 입력은 게이트 드라이브 IC로 곧바로 이동한다. 그러나 0Ω 점퍼를 변경하여 이 회로를 사용함으로써 매우 짧은 펄스를 생성할 수 있다. 이 회로를 사용하고자 하는 한다면, 윌리엄의 애플리케이션 노트를 참조하는 것이 좋다.
결론
GaN 전력 트랜지스터의 성능은 레이저 드라이버의 성능을 향상시킬 수 있다. 몇 제곱 밀리미터에서 수백 와트를 제공하는 한 자리수 나노초의 고전류 펄스를 생성하는 능력이 매우 탁월하기 때문이다. 이는 소형 폼팩터를 기반으로 경제적인 고성능 라이다를 구현할 수 있는 주요 요소 중 하나이며, 이를 통해 라이다 혁명을 더욱 가속화시킬 수 있다.
참고자료
1) H. Johnson and M. Graham, High-Speed Digital Design – A Handbook of Black Magic, Prentice Hall PTR, 1993.
2) J. Weber, Oscilloscope Probe Circuits, Tektronix Inc., 1969.
3) Tektronix Inc, “20X Low Capacitance Probe – P6158 Datasheet,” 2017, (https://www.tek.com/sites/default/files/media/media/resources/P6158-Datasheet-60W120263_0.pdf)
4) Susumu 2018 Product Catalogue (EN), 2018-04-06, pp. 53-54. 2018, (https://www.susumu.co.jp/common/pdf/n_catalog_partition09_en.pdf?v=20180406)
5) J. Williams, “AN98 Signal Sources, Conditioners, and Power Circuitry – Circuits of the Fall, 2004: Nanosecond Pulse Width Generator,” Linear Technology Corporation, 2004.
#본 기사에 관하여 e4ds.com에서는 라이다를 위한 GAN 기술에 대하여 실험적 논의를 수행중에 있습니다. 본 기술에 관한 질문이나 추가 기고를 원하는 경우 아래에 댓글을 달아주시기 바랍니다.

.png)

