

미래 전략산업으로 주목받는 로봇이 모든 제조·서비스 영역에서 전후방 산업 생태계를 형성하며 혁신을 견인할 것으로 기대된다. 로봇은 산업용 로봇, 서비스 로봇으로 나뉜다. 제조 산업용 중심으로 발전해온 로봇은 최근 센서·AI·자율주행 등 ICT와 접목해 배송·돌봄·서빙·순찰 등 일상생활에서 다양한 편익을 제공할 수 있는 지능형 서비스 영역으로 확장했다.
2023-10-20 10:04:01by 김예지 기자

한국전자기술연구원(KETI, 원장 신희동)이 수작업 위주의 전통 식품 분야(김치, 전통장류) 자동화 공정을 위한 로봇 작업지능 인식시스템 기술을 개발했다.
2023-11-14 11:01:13by 배종인 기자
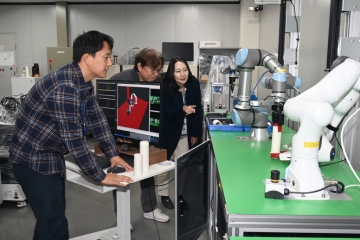
한국전자통신연구원(ETRI)이 제품조립 분야에 최신 인공지능(AI)과 디지털 트윈(Digital Twin) 기술을 활용해 다관절 로봇(로봇 팔)이 제품조립에 요구되는 인지, 판단, 계획, 동작을 스스로 수행하는 기술 개발에 성공했다.
2023-11-24 15:50:28by 배종인 기자

글로벌 1위 협동로봇 전문 기업 ‘유니버설 로봇(Universal Robots)’은 울산대학교를 국내 열한 번째 유니버설 로봇의 공인인증 트레이닝 센터로 지정해 현판식을 진행했다고 27일 밝혔다.
2023-11-27 10:00:33by 김예지 기자

유니버설 로봇(Universal Robots)은 협동로봇 신제품 ‘UR30’을 출시했다고 29일 밝혔다. 시중에 나온 협동로봇 중 가장 무거운 가반하중(협동로봇이 들어 올릴 수 있는 최대 무게) 30kg의 제품이다.
2023-11-29 16:46:39by 김예지 기자

지멘스 디지털 인더스트리 소프트웨어(Siemens Digital Industries Software)는 노르웨이의 자율 공장 자동화 스타트업 기업인 ‘휠미’가 다양한 사물을 자율주행 로봇으로 변환할 수 있는 차세대 자율 시스템 지니어스 2 개발을 위해 서비스형 Siemens Xcelerator 산업용 소프트웨어 포트폴리오를 선택했다고 18일 발표했다.
2023-12-18 09:41:06by 배종인 기자
