.jpg)
▲(좌측부터)서울대학교 기계공학부 조규진 교수(교신저자), 네이버랩스 최우영 연구원(공동 주저자), 한국과학기술연구원 김웅배 연구원(공동 주저자)
기존 소프트 로봇 속도·힘 한계 극복
기존 소프트 로봇의 속도 및 힘의 한계를 극복해 부드러운 몸체에서 강한 힘을 발휘하는 소프트 로봇이 개발돼 향후 다양한 응용이 이뤄질 것으로 기대된다.
서울대학교 공과대학 기계공학부 조규진 교수 연구팀이 부드러운 재료로 이루어진 소프트 로봇 몸체가 빠르고 강한 동작을 구현하는 ‘초탄성 토크 역전 매커니즘(Hyperelastic Torque Reversal Mechanism, HeTRM)’을 개발했다.
이번 연구는 갯가재와 벼룩의 동작 원리를 응용한 것으로, 갯가재가 단단한 먹이를 부술 때 시속 약 90km/h의 주먹을 날리고, 벼룩은 자기 몸길이의 200배 이상 높이로 점프할 수 있는 능력에서 영감을 받았다.
조규진 교수는 “부드러운 몸체의 생명체가 순간적으로 강한 힘을 내는 비결은 근육이 팔 또는 다리에 가하는 회전력의 방향을 순식간에 전환할 수 있는 토크 역전 매커니즘”이라며 “이번 연구는 고무처럼 말랑말랑한 재료로 강력한 운동 성능을 구현했다는 점에서 큰 의의가 있다”고 설명했다.
연구팀은 탄성중합체(Elastomer)가 응축될수록 급격히 단단해지는 특성에서 초탄성 토크 역전 매커니즘의 핵심 원리를 발견했다.
부드러운 관절의 한쪽 부분을 집중적으로 응축시킬 경우, 저장된 에너지를 순간적으로 방출하는 초탄성재료의 특징을 소프트 로봇 기술로 발전시킨 것이다.
모터와 힘줄 한 쌍을 유연 관절에 연결한 간단한 구조만으로도, 유연 관절을 강한 힘으로 반복해서 빠르게 움직일 수 있다.
이번 연구는 단순히 이론적 성과에 그치지 않고 다양한 응용 가능성도 제시했다.
예를 들어 떨어지는 탁구공을 순식간에 잡아내는 소프트 그리퍼, 모래밭 같은 험지에서도 강력한 추진력으로 기어가는 로봇, 문어 다리처럼 물체를 감싸 쥐는 로봇 등이 있으며, 구조가 의도되지 않은 강한 힘을 받을 때 스스로 접촉을 차단하는 기계적 퓨즈도 구현했다.
공동 주저자인 최우영 연구원과 김웅배 연구원은 “이번 연구는 구조적 설계 대신 재료의 특성을 활용해 빠른 동작을 구현함으로써 소프트 로봇 기술의 새로운 가능성을 제시했다”고 평가했다.
조규진 교수는 “이번에 개발한 매커니즘은 소프트 로봇의 설계 및 활용 범위를 한 차원 넓혀줄 것”이라며 기대감을 나타냈다.
한편 이번 연구는 로봇 분야의 저명한 학술지 ‘사이언스 로보틱스(Science Robotics)’에 1월29일 게재됐다.
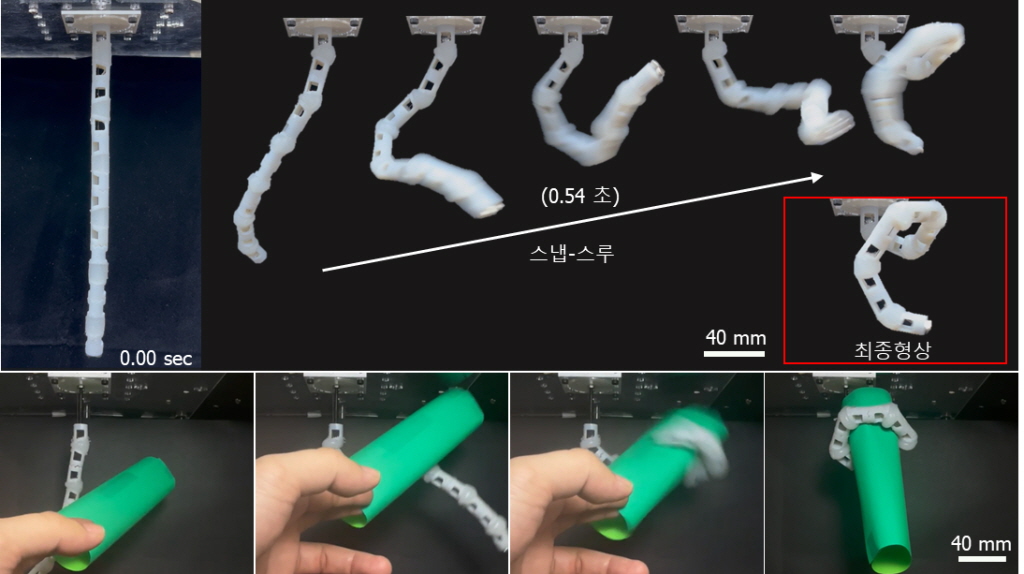
▲HeTRM 활용 예시 1 : 유연 관절에 에너지를 저장해뒀다가 마치 문어와 같이 순식간에 물건을 휘감을 수 있다.
