
.jpg)

디스플레이가 구동 가능한 유기발광다이오드(OLED) 전자 섬유가 개발돼 패션, 기능성 의류 등에서 적용이 가능할 것으로 기대를 모으고 있다.
2021-05-13 08:02:14by 배종인 기자
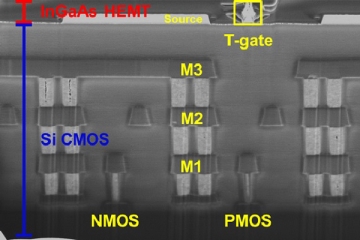
KAIST 전기및전자공학부 김상현 교수 연구팀이 기존 통신 소자의 단점을 극복하는, 모놀리식 3차원 집적 기반 화합물 반도체 소자 기술을 개발했다. 연구팀은 Si CMOS 기판 위에 III-V HEMT를 3차원 집적해 두 디바이스의 장점을 극대화하는 공정과 소자 구조를 제시했다. 동시에 기판 신호 간섭에 의한 잡음 제거도 증명했다.
2021-06-15 10:10:12by 이수민 기자

K-반도체를 이끌어 갈 인재와 아이디어의 장인 ‘제22회 대한민국 반도체 설계대전’에서 KAIST가 ‘6G 통신을 위한 초저잡음 W-band PLL’로 영예의 대통령상을 수상했다.
2021-11-23 09:32:37by 배종인 기자
