.png)

AI 기술 도입은 도축 자동화 로봇 시스템에서부터 무인 방제 로봇, 식물공장, 수직농장, 농업용 모빌리티, AI 농산물 선별기 등에 이르기까지 매우 다양한 농기계·장비·시스템 영역에서 진행되고 있다.
2024-08-01 13:40:09by 권신혁 기자
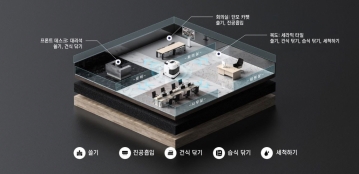
‘케어로봇’ 전문기업 라이노스는 AI 청소로봇 ‘휠리’의 무료 시연 이벤트를 5일부터 실시한다. 오는 9월 본격 출시를 앞두고 펼쳐지는 라이노스의 이번 이벤트는 청소 구역 맵핑 및 감지시스템 등 일반 청소로봇에서는 아쉽게 느껴졌던 활동을 휠리가 어떻게 ‘AI 청소로봇’답게 해결하는지, 고객이 실제 사용 공간에서 확인할 수 있는지를 보여 줄 예정이다.
2024-08-05 13:45:08by 배종인 기자
농촌의 인력난이 가중되자 무인 스마트팜을 가능케할 차세대 농테크(농업+테크)가 각광받고 있다. 특히 수확기는 가장 많은 인력이 필요한 시기로, 이러한 농업 특성에 기인해 수확 자동화 솔루션은 꿈의 기술로 불리고 있다.
2024-08-07 11:03:18by 권신혁 기자

SKT가 자사의 텔코 엣지 AI(Telco Edge AI) 인프라를 기반으로 한 자율주행 로봇 기술 실증을 성공적으로 마쳤다고 7일 밝혔다.
2024-08-08 10:46:17by 김예지 기자

현재 AI 반도체 시장은 AI 기술의 급속한 발전과 함께 산업 전반에 걸쳐 큰 변화를 일으키고 있다. 특히 스마트 팩토리, 물리보안 시스템, 로봇, AI 서버 등에서 저전력, 고성능, 저비용의 AI 인프라의 도입이 필수적이다. 이에 따라 AI 반도체에 대한 수요가 급증하고 있다.
2024-08-08 11:00:25by 권신혁 기자
