로봇 모듈 정의표준으로, 로봇 경제성과 직결
서비스로봇 모듈화 표준승인을 위한 절차 마쳐
모듈 형태의 로봇 부분품 생산․유통 가능해져
로봇을 구성하는 부분을 표준화하는 로봇 모듈화(Modularity) 분야 국제표준 개발을 한국이 주도하게 됐다.
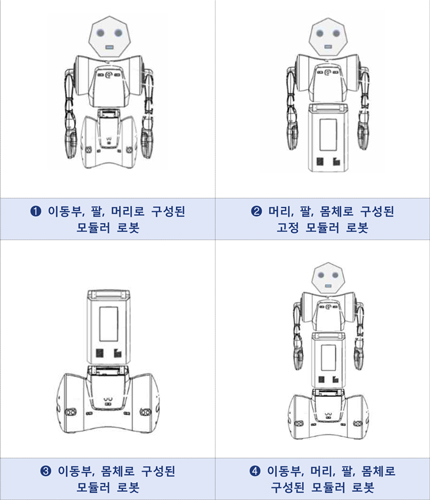
▲서비스로봇 모듈 활용 예
(출처=지능형로봇표준포럼 표준(KOROS 1106-1))
산업통상자원부 국가기술표준원은 3일부터 7일까지 제주에서 열린 ‘서비스로봇 국제표준화회의’에서 강원대 박홍성 교수가 제안한 ‘서비스로봇 모듈화 일반요구사항’에 대한 국제표준안이 표준승인(Final Draft International Standard; FDIS)을 위한 절차를 마쳤다고 밝혔다. 이 안은 회원국에 최종 회람 후 국제표준으로 등록될 전망이다.
이 국제표준안은 로봇시스템 구성 요소 가운데 기능적으로 독립성을 가지면서 부분개발·교체·재활용이 가능한 ‘로봇 모듈’을 정의하는 표준으로, 제조사 간 호환성, 로봇개발의 경제성과 직결되는 기술이다.
서비스로봇 모듈화 표준이 한국 주도로 국제표준화되면, 모듈 형태로 호환성이 확보된 로봇 부분품을 생산․유통할 수 있게 되어, 우리 중소중견기업들이 더 쉽게 로봇 시장에 진입할 수 있고, 다양한 서비스로봇의 신제품 개발이 촉진될 수 있을 것으로 기대된다.
강원대 박홍성 교수가 2017년 2월, 국제표준화기구(ISO)에 신규 국제표준안으로 제안해, 지난 3년간 논의를 이어왔다. 이 표준안은 오는 6월 국제표준 제정절차의 최종 관문인 FDIS 단계를 거쳐 올해 중 국제표준으로 제정될 예정이다.
또한, 한국은 이번 회의에서 이 국제표준안의 후속 표준 2종을 신규 국제표준 작업과제(New Proposal; NP)로 제안하기 위한 세부 내용 협의를 함께 진행함으로써, 서비스로봇 모듈화 분야 국제표준 선점 기반을 마련했다.
‘서비스로봇의 모듈간 인터페이스’, ‘소프트웨어인터페이스 공통 정보’를 규정하는 2종의 국제표준안은 각각 오는 5월과 11월에 신규 작업과제로 제안될 예정이다.
그뿐만 아니라, 한국은 세종대 문승빈 교수 주도로 ‘서비스로봇 주행성능 국제표준(ISO18646-2)’에 ‘경로정확도’ 등 성능 항목을 추가하여 올해 10월에 개정안을 제안하기로 하여 주행성능 국제표준 개정도 한국 주도로 개발할 수 있게 되었다.
서비스로봇 안전 표준화 분야에서는 LG전자가 중심이 되어 ‘개인지원로봇의 안전요구사항 국제표준(ISO 13482)’에 ‘국내 산업계에 불리하게 작용할 수 있는 과도한 안전요구사항’을 개선할 수 있는 개정 항목을 제안하는 활동에 주력했다.
한편, 이번 회의는 코로나바이러스 여파로 중국(7명), 독일(4명) 대표단이 모두 불참하는 등 20여 명의 전문가가 참석하지 못했으나, ISO의 회의 개최 지침에 따라 불참 전문가들은 웹 미팅 방식으로 회의에 참여했다.