.png)

엔비디아가 5월 25일 서울을 시작으로 30일 대전, 6월 1일 부산에서 최신 딥러닝 및 인공지능 트렌드와 기술을 공유하는 ‘엔비디아 딥러닝 데이 2017(NVIDIA DEEP LEARNING DAY 2017)’을 개최한다. 딥러닝 및 인공지능에 대한 관심이 지속적으로 증가하고 적용 분야가 점차 확대됨에 따라, 딥러닝의 저변 확대를 위해 엔비디아는 작년에 이어 올해 2년 차로 ‘엔비디아 딥러닝 데이’를 개최하고 있다. 엔비디아 딥러닝 데이를 통해, GPU 기반 딥러닝 기술을 이끌고 있는 엔비디아 전문가들은 관련 종사자 및 교수, 학생들과 함께 4차 산업혁명의 중심에 있는 딥러닝 및 인공지능의 최신 기술과 정보를 공유하고, 실질적인 트레이닝랩을 제공한다.
2017-04-17 10:48:13by 김지혜 기자
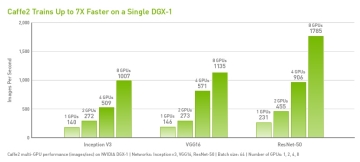
엔비디아, 페이스북과 협력해 AI 딥 러닝 프레임워크 Caffe2 역량 강화 엔비디아는 페이스북이 오픈소스로 공개한 인공지능(AI) 딥 러닝 프레임워크인 카페2(Caffe2)와 함께 인공지능 발전을 위한 양사 협력의 결과를 발표했다. 페이스북은 넘쳐나는 데이터 관리를 돕는 인공지능 시스템을 개발하고 있다. AI 시스템으로 효율적인 커뮤니케이션을 돕는다. 개발자 및 연구원은 Caffe2를 활용해 대규모 분산 트레이닝 시나리오를 구성하고 사용자 디바이스용 머신러닝 애플리케이션을 개발할 수 있다. 모바일 상에서 인공지능 기반 서비스를 제공하기 위해서는 복잡한 데이터 처리 작업이 순식간에 진행되어야 한다. 이처럼 빠른 인공지능 서비스 처리는GPU 가속화 컴퓨팅과 가속화된 하드웨어의 전체 성능을 활용할 수 있는 딥 러닝 소프트웨어가 필요하다. ? 엔비디아와 페이스북은 Caffe2 딥 러닝 프레임워크 상에서의 공동 작업을 통해 인공지능 가속화를 제공하고 있다. 공동 엔지니어링을 통해 시작부터 끝까지 조정함으로써, 엔비디아 GPU 딥 러닝 플랫폼의 장점을 최대한 활용할 수 있도록 구성했다. Caffe2는 최신 엔비디아 딥 러닝 SDK 라이브러리인 cuDNN, cuBLAS, NCCL을 활용하여 고성능의 멀티 GPU 가속 트레이닝 및 추론을 제공한다. 이에 따라 사용자들은 Caffe2가 엔비디아 GPU 시스템에서 최적의 성능을 제공한다는 사실을 인지하고, 인공지능 기반 애플리케이션 개발에 집중할 수 있다. 본 협업의 일환으로 엔비디아 DGX-1 AI 슈퍼컴퓨터는 딥 러닝에 최적화된 소프트웨어 스택에 Caffe2를 제공하는 최초의 인공지능 시스템이 될 전망이다. DGX-1과 Caffe2 모두 높은 성능 및 빠른 트레이닝을 제공한다. 향후 고객들은 엔비디아 DGX-1 컨테이너 레지스트리(DGX-1 Container Registry)를 통해 DGX-1용 Caffe2를 이용할 수 있다. 그 동안 엔비디아는 엔비디아 딥 러닝 인스티튜트를 통해 전 세계 1만 여 명 이상의 개발자들이 프레임워크를 활용하여 다양한 지능형 애플리케이션 및 서비스용 뉴럴 네트워크 기반 머신러닝을 설계, 훈련, 구축할 수 있도록 지원해왔다. Caffe2 트레이닝은 현지시간 5월 8일부터 11일까지 미국 샌프란시스코 산호세에서 개최되는 GPU 테크놀로지 컨퍼런스에서 제공하는 엔비디아 딥 러닝 인스티튜트를 통해 만나볼 수 있다.
2017-04-21 11:14:42by 김자영 기자

엔비디아가 미국 현지시간으로 5월 8일부터 11일까지 실리콘밸리에서 개최되는 세계 최대 GPU 개발자 컨퍼런스 ‘GTC 2017 (GPU Technology Conference 2017)’에 다양한 자율주행차 관련 세션을 마련한다고 밝혔다. 올해 GTC에서는 컨퍼런스 및 실습 세션, 전시, 시연, 네트워킹 이벤트 등이 진행된다. 그 중에서도 다수의 업계 파트너들과 전문가들이 참석하는 자율주행차 소프트웨어 세션에서는 인공지능이 자율주행차용 소프트웨어 개발에 어떻게 활용되고 있는지 소개될 예정이다. 먼저, 메르세데스-벤츠(Mercedes-Benz)의 커넥티드카, 사용자 인터랙션, 텔레매틱스 R&D그룹 총괄은 차량 내부에 센서 프로세싱 및 퓨전 솔루션용 임베디드 하드웨어를 장착한 차량에서 인공지능을 구현하는 방법을 선보인다.
2017-05-02 10:55:20by 김지혜 기자