
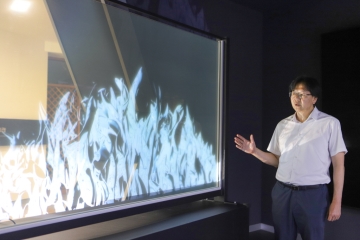
과학기술정보통신부 산하 한국기계연구원(원장 류석현) 나노리소그래피연구센터 정준호 책임연구원 연구팀과 ㈜메타투피플(대표 안준원)은 주변 조명과 영상의 정보에 따라 투명도를 자유자재로 조절할 수 있는 100인치 대형 나노 투명 스크린 상용화에 성공했다.
2024-07-04 15:48:16by 배종인 기자
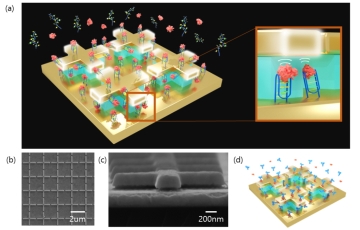
UNIST(총장 박종래) 전기전자공학과 이종원 교수와 한국기계연구원(원장 류석현) 나노리소그래피 연구센터 정주연 박사 공동연구팀이 단백질 검출 민감도를 획기적으로 높인 새로운 바이오센서를 개발했다.
2024-07-11 11:44:33by 배종인 기자
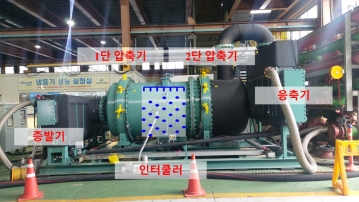
과학기술정보통신부 산하 한국기계연구원(원장 류석현) 히트펌프연구센터 김정철 선임연구원이 물을 냉매로 하여 냉각하거나 열을 이동시킬 수 있는 친환경 물 냉매 냉각 시스템 원천기술을 국내 최초로 개발했다.
2024-07-26 13:37:18by 배종인 기자
.jpg)
한국재료연구원(KIMS, 원장 최철진)과 한국기계연구원(KIMM, 원장 류석현)이 연구 협력을 위한 ‘협력마중물 사업’의 원활한 소통의 자리인 ‘2024년 기계연-재료연 1차 협력교류회’를 개최했다.
2024-07-29 15:10:20by 배종인 기자
.JPG)
한국기계연구원(원장 류석현)과 나노종합기술원(원장 박흥수)이 300㎜ 반도체 첨단 패키징 인프라 구축 및 기술 개발을 위해 손을 맞잡았다.
2024-08-01 14:10:43by 배종인 기자

과학기술정보통신부 산하 한국기계연구원(원장 류석현)이 대한기계학회 기어트레인연구회와 공동으로 ‘2024 KIMM 기어트레인 컨퍼런스’를 8월 13, 14일 양일간 개최했다.
2024-08-19 13:47:12by 배종인 기자
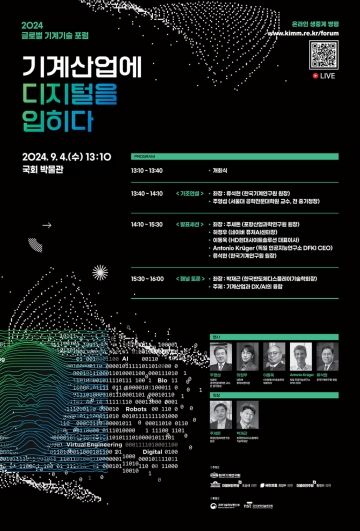
과학기술정보통신부 산하 한국기계연구원(원장 류석현)은 오는 9월4일 오후 1시10분부터 서울 국회 박물관에서 ‘2024 글로벌 기계기술 포럼’을 온·오프라인으로 동시 개최한다. 과학기술정보통신부와 국가과학기술연구회의 후원으로, 기계연과 국회 더불어민주당 조승래 의원, 국민의힘 최형두 의원, 더불어민주당 황정아 의원이 공동 주최하는 이번 포럼은 디지털 대전환을 주제로 기계기술 관련 국내외 전문가를 초청해 변모하는 미래 기계기술의 발전 방향을 논의한다.
2024-08-26 10:38:16by 배종인 기자
